Hemmung (Uhr)

Die Hemmung (früher auch Gang; franz. échappement; engl. escapement) ist jene Baugruppe in Räderuhren, die die Verbindung zwischen dem Räderwerk und dem Gangregler (etwa dem Pendel) herstellt. Sie besteht als Ankerhemmung in der Regel aus dem Hemmungsrad (Gangrad, Steigrad oder Ankerrad)[1] und dem Hemmstück (Anker, Ruhestück). Der Gangregler bewirkt über das in das Hemmungsrad eingreifende Hemmstück das periodische Anhalten („Hemmen“) des Räderwerks und damit den regelmäßigen Gang der Uhr. In umgekehrter Richtung erhält er Energie (Hebung, Impuls), um nicht stehen zu bleiben. Ein Pendel wird periodisch „gehoben“.[2]
Dieser Artikel beschreibt nur Hemmungen, die auf klassischen Schwingsystemen beruhen, also Pendel, Unruh oder Foliot (Waag). Die Umsetzung von Schwingungen anderer Oszillatoren wie Stimmgabeln, Quarzkristalle oder schwingfähiger Siliziumelemente in die getaktete Bewegung eines Uhrwerks wird hier nicht betrachtet.
Die Erfindung von drei Methoden der Hemmung gelang englischen Uhrmachern zwischen etwa 1685 und 1720. In China fand sich schon eine Ankerhemmung in einer astronomischen Uhr von Su Song (ab 1086).
Bauarten
Bekannt sind etwa 250 verschiedene Konstruktionen, die sich nach ihrer Funktion in drei Bauarten einordnen lassen, die auch die Chronologie ihrer Entwicklung mit steigender Ganggenauigkeit der Uhren widerspiegeln. Es handelt sich um
- Rückführende Hemmungen,
- Ruhende Hemmungen und
- Freie Hemmungen,
von denen im Folgenden die bedeutendsten Lösungen beschrieben werden.
Eine andere Einteilung unterscheidet zwischen Hemmungen für Pendeluhren und solche für Uhren mit Unruh-Spirale-Schwingsystem.
Rückführende Hemmung
Bei der rückführenden Hemmung wird das Hemmungsrad nicht nur periodisch angehalten, sondern es erleidet, wie das ganze übrige Räderwerk, jedes Mal eine durch den Gangregler (Schwinger) verursachte kleine Rückdrehung (daher die Bezeichnung „rückführende“ Hemmung). Dem Schwingsystem (Pendel, Unruh) wird so Energie entzogen (Abbremsung), da es für die Rückdrehung gegen das angetriebene Räderwerk eine Arbeit aufbringen muss. Die Schwingung wird dadurch gestört. Dies erfolgt nicht während der gesamten Schwingung, sondern nur in den Rückführungsphasen während der Bewegung zum jeweiligen Umkehrpunkt des Schwingers (siehe obenstehende Animation). Die Abbremsung ist abhängig vom das Räderwerk antreibenden Drehmoment und der daraus resultierenden Antriebskraft für den Schwinger. Auf diese Weise wird die Schwingungsdauer von der Antriebskraft beeinflusst. Ist diese nicht konstant (bedingt durch Fehler im Räderwerk, sich entspannende Auszugsfeder usw.), ergibt sich ein Gangfehler.[3]
Spindelhemmung
- Spindelhemmung3.png
Spindelhemmung mit Unruh und Feder als Gangregler
Spindelhemmung (Prinzip)

Spindelhemmung (Funktion)
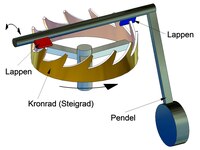
Die ersten Räderuhren mit Spindelhemmung nutzten ein Foliot (Waag, Balkenwaag) als Schwinger. Später wurden Pendel und Unruh als Gangregler verwendet.
Die beiden an der Welle (Spindel) angebrachten, zueinander winklig versetzten Bleche (Hemmungslappen, Spindellappen) greifen wechselweise so in das Hemmungsrad (hier Kronrad) ein, dass es sich bei jeder Schwingung des Gangreglers um einen Zahn weiter dreht. Es dreht sich bei jeder Halbschwingung um eine halbe Zahnteilung und hat eine ungerade Zähnezahl: 180° gegenüber einem Zahn befindet sich eine Zahnlücke. Weitere Erläuterungen zur Funktion siehe die Einführung unter „Rückführende Hemmungen“.
Das Foliot wurde im letzten Drittel des 17. Jahrhunderts durch das Pendel nach theoretischen Vorarbeiten durch Huygens ersetzt. Die Spindelhemmung verlangt wegen des kurzen Hebelarms der Lappen große Ausschläge (maximal sind jedoch ca. 100° möglich). Deswegen ist sie nur für leichte und kurze Pendel geeignet, die störanfälliger sind als wenig ausschlagende, schwere und lange Pendel.
Von größter Bedeutung war jedoch die Kombination der Spindelhemmung mit der durch eine Spiralfeder unterstützten Unruh zu Beginn des 17. Jahrhunderts. Damit wurden Uhren endgültig mobil, sie konnten am Körper getragen werden (Sackuhren).
Eine Unruh schwingt umso stabiler, je größer ihr Ausschlag ist. Die maximal mögliche Schwingungsweite von ca. 100° bei der Spindelhemmung stellte somit ein Hindernis für die Herstellung präziserer Uhren mit Unruh-Spirale-Schwingsystem dar. Andererseits erforderten präzise Pendeluhren aber sehr kleine Schwingungsweiten (ca. 5° und darunter), was, wie oben beschrieben, mit einer Spindelhemmung nicht realisierbar war. In der Folge wurden deshalb die ruhenden Hemmungen (Grahamhemmung für Pendeluhren, Zylinderhemmung usw. für Unruhuhren) entwickelt.
Die Spindelhemmung wurde bei Taschenuhren bis in das erste Drittel des 19. Jahrhunderts, bei ortsfesten Uhren (z. B. Comtoise-Uhren) noch bis etwa 1860 eingesetzt.
Für seine berühmte Uhr H4 benutzte John Harrison eine hochwertig gefertigte Spindelhemmung mit Diamantpaletten.[4][5]
Kreuzschlaghemmung

Prinzip der Kreuzschlaghemmung H Hemmelement, A Drehachse, K Koppelelement, HR Hemmungsrad, P Pendel

Kreuzschlaghemmung mit lediglich einem Pendel A Drehachse, HR Hemmungsrad, H Hemmelement, K Koppelelement, P Pendel

Mögliche Bahnkurven der Hemmelemente bei der Kreuzschlaghemmung A Drehachse, H Hemmelement, HR Hemmungsrad

Kreuzschlaghemmung nach Bürgi (Prinzip) H Hemmelement, HR Hemmungsrad, K Koppelelement, W Waag

Prinzip einer Kreuzschlaghemmung mit Gestängekopplung (eines der beiden Pendel kann entfallen)
Kennzeichnend für diese Hemmung ist, dass die beiden in das vom Laufwerk angetriebene Hemmungsrad HR eingreifenden Hemmelemente H (Blechlappen, Klauen, Paletten etc.) nicht starr miteinander verbunden sind, sondern sich um verschiedene Punkte A (Achsen) gegenläufig synchron verdrehen können (deshalb die Bezeichnung Kreuzschlag).[6][7] Erreicht wird das durch ein geeignetes Koppelelement K, das sehr vielfältig gestaltet sein kann (Schubgelenk, Zahneingriff etc.), welches den Zwanglauf erzwingt. Die Hemmelemente sind meist mit jeweils einem Schwinger P (Waag/Foliot, Pendel, Unruh) starr verbunden, so dass sich diese ebenfalls gegenläufig synchron bewegen. Aber auch Hemmungen, bei denen nur ein Hemmelement mit einem Schwinger versehen ist, werden als Kreuzschlaghemmungen bezeichnet. Das andere Hemmelement wird in diesem Fall durch das Koppelstück bewegt. Als Uhren mit Kreuzschlaghemmung gelten (fälschlicherweise) auch solche, die z. B. eine mit nur einem Schwinger (meist Pendel) zusammenarbeitende Ankerhemmung (oder andere) aufweisen, wobei ein zweiter Schwinger über ein lediglich beide Schwinger verbindendes Koppelelement angetrieben wird. Der Grund dafür ist wahrscheinlich die Ästhetik zweier sich gegenläufig bewegender Pendel, da die stabilere Schwingungsdauer kreuzschlagender Pendel im Vergleich zum einfachen Pendel zumindest angezweifelt werden kann. John Harrison verwendete in seiner Uhr H1 zwei zugfedergekoppelte kreuzschlagende Waagbalken (vgl. Grashüpferhemmung).[8]
Wegen der Vielzahl der möglichen Ausführungen kann die Kreuzschlaghemmung den drei Hemmungsarten (rückführend, ruhend, frei) nicht eindeutig zugeordnet werden. Das Kreuzschlagprinzip bietet aufgrund der Kreisbahnkurven der Hemmelemente um zwei Drehachsen mehr Gestaltungsmöglichkeiten für die Hemmung als das Ankerprinzip. Von Nachteil ist jedoch das Koppelelement (Reibung). Bekanntgeworden sind nur rückführende Kreuzschlaghemmungen.
Erfunden wurde die Kreuzschlaghemmung 1584 von Jost Bürgi. Er erreichte damit bessere Gangergebnisse als sie mit Spindelhemmungen möglich waren. Als Koppelelement verwendete er zwei ineinandergreifende Zahnräder, die mit jeweils einem Waagbalken W versehen waren (das Pendel wurde erst später durch Galilei bzw. Huygens eingeführt). Das Hemmungsrad war sehr groß im Verhältnis zu den Koppel-Zahnrädern (in der Prinzipdarstellung nicht berücksichtigt). Worauf sich die bessere Ganggenauigkeit dieser Konstruktion gründete, ist nicht ganz klar. Wahrscheinlich führte weniger das in dieser Weise ausgeführte Kreuzschlagprinzip als vielmehr die hochwertigere Ausführung aller Uhrenteile durch Bürgi zu diesem Ergebnis.[9] Eine Animation ist unter[10] zu finden.
Hakenhemmung oder Rückfallankerhemmung

Ankerhemmung mit massivem Anker

Hakenhemmung (Prinzip)
Hakenhemmung (Funktion)

Die Hakenhemmung wurde im Jahre 1676 von Robert Hooke erfunden und um 1680 von William Clement in die Uhrentechnik eingeführt.[11] Anstelle von Lappen an der Spindel (Spindelhemmung, siehe oben) wird ein aus gebogenem Blech gefertigter Hakenanker verwendet, der über eine Welle fest mit dem Schwinger (meist Pendel) verbunden ist. Die Haken greifen radial (die Lappen axial) in das Hemmungsrad (hier Ankerrad) ein. Ihr gegenseitiger Abstand entspricht einem ungeraden Vielfachen einer halben Zahnteilung des Ankerrades, das sich bei jeder Halbschwingung des Gangreglers um eine halbe Zahnteilung weiterdreht. Der von einem bestimmten Zahn zuerst getroffene Haken ist der Eingangshaken, der andere der Ausgangshaken. Die Haken sind weiter als die Lappen von ihrer Drehachse entfernt und so geformt, dass sie eine Hebung erzeugen (siehe Ruhende Hemmung). Dadurch ist der nötige Drehausschlag kleiner, und man kann längere Pendel verwenden, die wegen ihrer Schwere weniger störanfällig sind. Die verwendeten Hakenformen sind einander ähnlich, weichen im Detail jedoch voneinander ab. Räderuhren mit einem Anker können zudem flacher gebaut werden, da die Drehachse des Ankers (und damit die des Gangreglers) nicht mehr wie die Spindel um 90° gegen alle anderen Wellen des Uhrwerks verdreht ist. Die Hakenhemmung verdrängte zum Beginn des 19. Jahrhunderts die Spindelhemmung bei Pendeluhren. Insbesondere bei preiswerten Uhren (z. B. Schwarzwälder Uhren) wurde seit dieser Zeit die Hakenhemmung verwendet.[12]
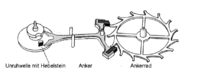
Nach dem gleichen Prinzip arbeitet der Rückfallanker (siehe obige Animation), ein aus dem Vollen gearbeitetes Werkstück, das auf der Welle des Pendels oder der Unruh befestigt ist. Bei Pendeluhren kann er eine eigene Welle aufweisen, wenn das Pendel an einem Faden oder an einer dünnen Blattfeder aufgehängt ist und mit einem an der Ankerwelle befestigten Bügel an den Anker angeschlossen ist.
Grashüpferhemmung
Prinzip der Uhr H1 von John Harrison

Grashüpferhemmung (Prinzip) H1, H2 Hemmelemente; G1, G2 Gewichte; D Anker- und Pendeldrehachse; A1, A2 Anschläge; AN Anker; D1, D2 Drehachsen der Hemmelemente; HR Hemmungsrad; P Pendel

Grashüpferhemmung (Eingriff) H Hemmelement; HR Hemmungsrad; S Drehpunkt

Grashüpferhemmung (Hinterschneidung) D1 Drehachse des Hemmelementes

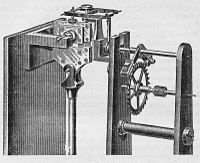
Grashüpfer-Hemmung von 1820
Grashüpferhemmung mit Pendelschwinger

Die Grashüpferhemmung (englisch grasshopper escapement) wurde zwischen 1722 und 1737 von John Harrison entwickelt und in seinen Marinechronometern H1, H2 und H3 verwendet, mit denen er das Längenproblem löste. Die Paletten (Hemmelemente) sind auf getrennten Armen untergebracht, die über Scharniere mit jeweils einem Waagbalken (bzw. Pendel) oder einem Anker verbunden sind und abwechselnd in das Hemmungsrad greifen.
Harrison wurde bei der Entwicklung offenbar von der Kreuzschlaghemmung Bürgis angeregt, wobei beide von der Annahme ausgingen, dass zwei gekoppelte Waagbalken (Foliots) ein genaueres Zeitnormal darstellten als nur einer. Er modifizierte die Kreuzschlaghemmung dahingehend, dass er die Hemmelemente nicht starr mit den gekoppelten Armen dieser Hemmung verband, sondern sie ihrerseits drehbar auf den Armen anordnete. Kleine Gewichte sorgten dafür, dass die Paletten nach dem Eingriff in das Hemmungsrad in durch Anschläge festgelegte Positionen bewegt wurden. Die nebenstehende Animation verdeutlicht dies für die in der Uhr H1 verwendete ursprüngliche Ausführung der Grashüpferhemmung. Die Waagbalken waren zusätzlich noch mit zwei Zugfedern gekoppelt[13] (Video unter[14]), was bei der Darstellung nicht berücksichtigt ist.
Gekoppelte Pendel konnte Harrison für seine Marinechronometer nicht verwenden, da deren Schwingung von den Schiffsbewegungen bei Wellengang (Rollen, Gieren usw.) beeinflusst worden wäre, während dies für Waagbalken (bzw. eine Unruh in der Uhr H4) nicht der Fall ist[15].
Spätere Entwicklungen, die nicht auf den Bau von Marinechronometern beschränkt waren, verzichteten auf das modifizierte Kreuzschlagprinzip und verwendeten nur einen Waagbalken bzw. ein Pendel, wie in der nachfolgenden Funktionsbeschreibung anhand einer Prinzipdarstellung erläutert wird. Erst dadurch wurde die Grashüpferhemmung zu einer eigenständigen Hemmung.
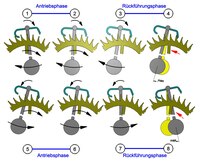
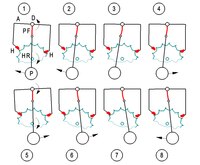
Zwei Hemmelemente H1 und H2 sind um zwei auf einem Anker AN angeordneten Drehachsen D1 und D2 auf Kreisbahnen beweglich, wobei diese Drehachsen sich ihrerseits auf Kreisbahnen um die Drehachse D des Ankers bewegen (siehe Bild). Ein Pendel P (bzw. Waagbalken) ist fest mit dem Anker verbunden. Die Hemmelemente bestehen aus langgestreckten Armen und weisen die Gewichte G1 und G2 auf, die dafür sorgen, dass die Hemmelemente gegen die auf dem Anker befestigten nachgiebigen Anschläge A1 und A2 (meist federnd) gedreht werden. Die Anschläge begrenzen die durch die Gewichte (geringe Kräfte) hervorgerufene Bewegung. Bei der Rückführung (siehe unten) müssen die Anschläge jedoch geringfügig nachgeben, da ansonsten die Hemmung blockiert würde. Das Hemmungsrad HR wird von einem Laufwerk angetrieben. Die Hemmelemente sind an ihren mit den Zähnen des Hemmungsrades in Kontakt tretenden Enden prismenförmig gestaltet.
Die Funktion der Hemmung kann in sechs Phasen unterteilt werden. In Phase 1 hat das Hemmelement H1 den Anker und damit das Pendel in Uhrzeigerrichtung beschleunigt, wobei H1 von seinem Anschlag wegbewegt wurde. Beide Hemmelemente befinden sich mit dem Hemmungsrad im Eingriff. H2 wurde, an seinem Anschlag anliegend, auf einer Kreisbahn um D in das Hemmungsrad eingeschwenkt. Das Hemmungsrad übt nun über H2 eine Kraft auf den Anker aus, die diesen entgegen dem Uhrzeigersinn zu drehen versucht. Dies ist jedoch nicht möglich, da das Pendel noch über kinetische Energie verfügt. Es schwingt noch etwas weiter im Uhrzeigersinn, so dass das Hemmungsrad etwas zurückgedreht wird (rückführende Hemmung). Die dabei vom Pendel gegen die Kraft des Hemmungsrades zu leistende Arbeit entzieht ihm die noch vorhandene kinetische Energie. Es wird abgebremst und erreicht seinen Umkehrpunkt. Das Pendel kann also nicht frei schwingen. Das ist der größte Nachteil der Grashüpferhemmung. Durch die geringe Rückdrehung des Hemmungsrades verliert H1 den Kontakt zum Zahn des Hemmungsrades und schwingt, vom Gewicht G1 beschleunigt, gegen seinen Anschlag (Phase 2). Diese Bewegung erfolgt sehr schnell („hüpfend“), was zur Bezeichnung Grashüpferhemmung geführt hat. In Phase 3 beschleunigt H2 den Anker (Pendel) entgegen der Uhrzeigerrichtung und löst sich dabei von seinem Anschlag. Phase 4 entspricht der Phase 1, jedoch für den Pendelausschlag in Gegenrichtung. H1 ist, an seinem Anschlag anliegend, auf einer Kreisbahn um D mit dem Hemmungsrad in Eingriff gekommen. In Phase 5 dreht H1 das Hemmungsrad wieder um einen geringen Betrag zurück. H2 gelangt außer Eingriff und das Pendel erreicht seinen Umkehrpunkt. In Phase 6 beschleunigt H1 den Anker im Uhrzeigersinn, wodurch am Ende wieder Phase 1 erreicht ist. Das Hemmungsrad ist um einen Zahn weitergeschaltet.
Der Kontakt eines Zahnes des Hemmungsrades mit dem prismatischen Ende des Hemmelementes kann als Schneidenlager betrachtet werden (siehe Bild). Während des Eingriffs verdrehen sich beide gegeneinander um S. Eine mit Verlusten durch Reibung aufgrund gegeneinander verschiebender Bewegungen (wie etwa bei Ankerhemmungen während der Rückführung oder Hebung) tritt nicht auf. Alle Funktionen der Hemmung werden durch vorteilhafte Drehbewegungen realisiert.
Die Gewichte G1 und G2 verursachen Drehmomente, die die Hemmelemente vom jeweiligen Zahn zu lösen und gegen ihre Anschläge zu drehen versuchen. Damit dadurch die Hemmelemente nicht außer Eingriff kommen können, ist eine der beiden Prismenflächen jedes Hemmelementes um einen Winkel α gegen die Tangente an die Kreisbahn um D1 bzw. D2 geneigt (siehe Bild). Der Winkel und die Prismenabmessungen sind klein gehalten, da ansonsten eine große Rückführung des Hemmungsrades erforderlich wäre, um ein sicheres Ausschwenken des Hemmelementes am Ende der Eingriffsphase zu gewährleisten. Selbstverständlich dürfen G1 und G2 nur so groß gewählt werden, dass sie keine Rückdrehung des Hemmungsrades durch die Hemmelemente bewirken.[16]
Die Hemmung kann schiebend, ziehend oder ziehend-schiebend bzw. schiebend-ziehend ausgeführt werden, je nachdem, ob das Hemmungsrad die Hemmelemente zieht oder schiebt. Im nebenstehenden „Schattenrissbild“ ist eine schiebend-ziehende Version dargestellt. Auch Konstruktionen, bei denen die beiden Hemmelemente auf verschieden große Hemmungsräder wirken, sind bekannt. Ein Video ist unter[17] zu finden.
Der Einsatz der Hemmung im Uhrenbau blieb beschränkt, da die etwa zur gleichen Zeit eingeführte Grahamhemmung Vorteile aufwies (weitgehend freie, nur durch gleichmäßige Ruhereibung gedämpfte Pendelschwingung).
Ruhende Hemmung
Bei der Ruhenden Hemmung wird das Hemmungsrad vom Gangregler nur periodisch angehalten. Es erfährt keine Rückdrehung während des Weiterschwingens des Gangreglers auf dem Ergänzungsbogen, seinem restlichen Weg bis zur Umkehr. Das Hemmungsrad befindet sich nahezu in ständigem Kontakt mit dem Schwingsystem und wird nur beim Weiterdrehen kurzzeitig freigegeben. Dieser Kontakt wird in der Fachsprache als „ruhereibend“ bezeichnet. Das bedeutet, dass bei sich nicht bewegendem Hemmungsrad (Ruhe) ein Zahn dieses Rades ständig mit einer bestimmten Kraft an einer (zylindrischen) Ruhefläche eines Elementes (Ankerklaue bei Pendeluhren, Unruhwelle bei Unruhuhren) des sich bewegenden Schwingsystems anliegt und so eine Reibkraft ausübt. Zu beachten ist, dass bei Pendeluhren mit Ruhender Hemmung Anker und Pendel eine fest verbundene Einheit bilden, der Anker also Bestandteil des Schwingsystems ist. Das gilt prinzipiell auch für Pendel, die an einer Pendelfeder (Blattfeder) aufgehängt und z. B. mit einer Gabel an den Anker gekoppelt sind, da sie sich während der gesamten Schwingung gemeinsam bewegen.
Die nahezu während der gesamten Schwingung vorhandene gleichmäßige Ruhereibung hat sich als Vorteil gegenüber der Rückführenden Hemmung erwiesen, bei der die Reibung nur in bestimmten Schwingungsphasen wirkt, nämlich bei der Rückführung (andere Reibungsursachen wie Lagerreibung usw. wirken selbstverständlich mehr oder weniger bei allen Hemmungen und sind nicht für eine charakteristisch). Wie bei der Rückführenden Hemmung beeinflussen Drehmomentschwankungen des Räderwerks die Ganggenauigkeit, da sich dadurch die am Schwinger wirkende Anlagekraft und damit die Ruhereibung ändert, was sich auf die Schwingungsdauer auswirkt.
Präzise Pendeluhren erfordern lange, schwere Pendel mit geringer Schwingungsweite (ca. 5° und darunter), während dagegen für genaue Unruhuhren große Schwingungsweiten (ca. 220° und darüber) notwendig sind. Diese, von Rückführenden Hemmungen nicht erfüllbaren Forderungen können mit Ruhenden Hemmungen realisiert werden.
Gleichmäßige (geringe) Reibung und optimal angepasste Schwingungsweiten sind also Vorteile der Ruhenden Hemmung.
Die Ruheflächen sind Teil einer zylindrischen Fläche, deren Achse mit der der Welle des Gangreglers (beziehungsweise des Ankers) identisch ist. Die Kontaktflächen weisen große Materialhärte (Stahl, Edelstein-Paletten) auf und werden meist geölt.
Bei der Rückführenden Hemmung treibt das Hemmungsrad den Gangregler nach der Umkehr von Rückdrehung zu Vorwärtsdrehung bis zum Ende des Eingriffs an. Diese bei der Ruhenden Hemmung fehlende Möglichkeit der Energieübertragung auf den Gangregler wird von der sogenannten Hebung übernommen. Nach dem Kontaktende zwischen Zahn und Ruhefläche gleitet die Zahnspitze über eine schräge Fläche (Hebefläche) eines Elements des Schwingsystems (z. B. Ankerklaue bzw. Palette) oder eine Kante des Schwingsystems (z. B. Palettenkante) gleitet über eine schräge Fläche am Zahn. Nach dem Prinzip der Schiefen Ebene wird so dem Schwinger ein Antriebsimpuls erteilt. Näheres dazu siehe die entsprechenden Hemmungen.
Grahamhemmung
- Grahamhemmung.png
Grahamhemmung

Grahamhemmung (Prinzip)

Grahamhemmung (Aufbau)

Grahamhemmung (Funktion)

Grahamhemmung (Antriebsimpulse)
Die Grahamhemmung[18] ist eine reibende, ruhende Hemmung. Sie wurde Anfang des 18. Jahrhunderts von George Graham auf der Basis der Idee der gleichen Hebung entwickelt.[19] Wesentliche Vorarbeiten werden Thomas Tompion und Richard Towneley zugeschrieben.
Bei dieser Hemmung werden die notwendigen Funktionen
- Periodische Unterbrechung der Bewegung des Hemmungsrades
- Periodischer Antrieb des Schwingers
im Gegensatz zu rückführenden Hemmungen klar getrennt und von verschiedenen Flächen zweier in das vom Laufwerk angetriebene Hemmungsrad wechselweise eingreifenden Hemmelementen (Paletten) übernommen, die an einem mit dem Pendel verbundenen Anker befestigt sind. Die hemmenden Anschlagflächen werden als Ruheflächen bezeichnet, die den Antriebsimpuls vermittelnden Flächen sind die Hebeflächen (siehe Bild). Die Hebeflächen können als um die Ankerachse drehbare schiefe Ebenen aufgefasst werden. Beim Gleiten eines Hemmungsradzahnes auf einer Hebefläche wird eine Kraft auf den Anker ausgeübt. Der Vorgang heißt Hebung. Die Ruheflächen sind als zylindrische Flächen ausgeführt, deren Achse mit der Ankerachse zusammenfällt.
Der Radius der Eingangsruhefläche Re ist um die Palettenbreite (bei beiden Paletten gleich) größer als der Radius der Ausgangsruhefläche Ra (Eingang und Ausgang ergeben sich aus der Drehrichtung des Hemmungsrades). Damit ist die Lage der Paletten auf dem Anker definiert (abgesehen von der justierenden Verschiebung). Die Mitten der Hebeflächen liegen somit auf einem gemeinsamen Kreisbogen um die Ankerachse. Der Anker wird deshalb als gleicharmig bezeichnet. Wenn sich der Anker (mit Pendel) bei stillstehendem (also gehemmtem) Hemmungsrad bewegt, reibt eine Zahnkante auf der Ruhefläche. Dadurch wird dem Schwingsystem Energie entzogen. Der Winkel, um den sich das Pendel (mit Anker) bei gehemmtem Hemmungsrad bewegt, wird Ergänzungsbogen genannt. Bei symmetrischem Ausschlag des Pendels ist der Energieentzug an der Eingangsruhefläche größer als an der Ausgangsruhefläche, da das auf den Anker von der Reibung ausgeübte Drehmoment (Kraft mal Hebelarm; Re und Ra sind die Hebelarme) größer ist.
Die dem Schwingsystem entzogene Energie muss ihm zurückgegeben werden, damit die Schwingung aufrechterhalten wird. Dies geschieht beim Gleiten der Hemmungsradzähne über die Hebeflächen. Bei der Grahamhemmung ist das Konzept der gleichen Hebung am Eingang und Ausgang verwirklicht. Die Neigung der Hebeflächen ist dabei so gewählt, dass die Hebung jeder Hebefläche während eines gleich großen Drehwinkels des Ankers auf diesen einwirkt. Dieser Winkel wird als Hebungswinkel γ bezeichnet. Gleiche Hebung bedeutet allerdings nicht, wie meist angenommen, dass dann auch der Antriebsimpuls gleich groß ist (Näheres dazu siehe das Beispiel weiter unten).
Die für Grahamhemmungen verwendeten Pendel sind im Gegensatz zu solchen bei rückführenden Hemmungen relativ lang und schwer. Der Pendelausschlag ist sehr klein (5° und darunter). Das Hemmungsrad und der Anker bestehen zumeist aus Messing. Die Radzähne sind spitz zulaufend und hinterschnitten. Die Paletten sind aus gehärtetem Stahl oder Rubin gefertigt und mit Laschen und Schrauben am Anker geklemmt. Sie können somit justiert werden.
Die Funktion der Hemmung ist aus nebenstehendem Bild ersichtlich. In den Phasen 1 und 6 befindet sich das Pendel nach Vollendung des Ergänzungsbogens in seinem Umkehrpunkt und schwingt dann ruhereibend zurück. Darauf folgt die Hebung. Am Ende der Hebung wird ein Zahn von einer Palette freigegeben und ein anderer schlägt an der jeweils anderen Palette an. Diese Hemmungsradbewegung wird Fall genannt. Nach dem Fall schwingt das Pendel im Ergänzungsbogen wieder ruhereibend bis zum Umkehrpunkt.
Der Vorgang der Hebung sei kurz an einem Beispiel erläutert. Das vom Laufwerk angetriebene Hemmungsrad wirkt mit einer Kraft F (tangential zum Rad) während der Hebung auf die Hebefläche ein (siehe Bild) und erzeugt das Antriebsdrehmoment Fa·a (Kraftkomponente mal Hebelarm). Fa und a ändern sich während der Hebung. Die dem Anker zugeführte Energie (Antriebsimpuls) ergibt sich (vereinfacht) aus der Multiplikation des Antriebsmomentes mit dem Hebungswinkel γ, denn während dieser Winkelbewegung des Ankers wirkt das Moment. In den Diagrammen ist der Verlauf der Momente Me (Eingang) und Ma (Ausgang) gezeigt. Die Flächen Ie und Ia stellen somit die jeweilige Größe des Antriebsimpulses dar. Es ist ersichtlich, dass bei gleicher Hebung die Impulse am Eingang und Ausgang nicht gleich groß sind. Der Eingangsimpuls übersteigt den Ausgangsimpuls um das 1,14fache. Dies hätte eine unsymmetrische Schwingung zur Folge. Nun sind aber (in diesem Beispiel) die Radien der Paletten zu Re = 1,1 Ra gewählt. Der Energieverlust am Eingang ist also um das 1,1fache größer als am Ausgang. Der höhere Eingangsimpuls gleicht diesen Unterschied praktisch aus, so dass eine symmetrische Schwingung erreicht werden kann. Die Hemmung bietet also Optimierungsmöglichkeiten durch geeignete Wahl der Parameter.
Die Entwicklung der Grahamhemmung war eine der größten Innovationen in der Geschichte der mechanischen Uhren. Alle Hemmungen für präzise Pendeluhren (ausgenommen Turmuhren) basieren auf dem Prinzip von Graham und sind folglich auch sehr ähnlich aufgebaut.[20] Nur für Uhren mit extremen Anforderungen wurden freie Hemmungen (Riefler, Strasser) verwendet.
Amant-Hemmung (auch: Stiftenhemmung, Scherenhemmung, Mannhardtgang)

Amant-Hemmung

Bei der Amant-Hemmung ist der Drehpunkt des Ankers relativ weit vom Drehpunkt des Hemmungsrades entfernt. Dadurch sind die Ankerarme langgezogen und haben einen geringen Öffnungswinkel. Die Haken greifen in achsparallele Stifte auf dem ungezahnten Hemmungsrad ein. Der Eingangshaken wirkt radial von innen nach außen auf die Stifte, der Ausgangshaken von außen nach innen. Die Amant-Hemmung ermöglicht einen sehr präzisen Gang und wurde oft bei Turmuhren verwendet.
Zylinderhemmung
- Zylinderhemmung2.png
Zylinderhemmung

Die Zylinderhemmung[21] in einem Zylinderwerk hat anstatt eines Ankers und eines Ankerrads einen Zylinder mit Ausschnitten, den sogenannten Passagen, und ein Zylinderrad (Hemmungsrad) mit hochgesetzten, spezifisch geformten Zähnen, die direkt in die als Hohlzylinder gestaltete Unruhwelle eingreifen.[22] Der ausgeschnittene Zylinder greift nur über einen Zahn (halbe Zahnteilung) des Hemmungsrads, hat folglich einen sehr kleinen Durchmesser. Diese Hemmung wurde 1695 vom englischen Uhrmacher Thomas Tompion erfunden und von George Graham 1720 entscheidend verbessert.[23] Wegen der außerordentlich hohen Ansprüche an die Fertigungsgenauigkeit wurde sie erst etwa 100 Jahre später in größerer Zahl hergestellt. Sie löste die Spindelhemmung in tragbaren Uhren ab.
Die Unruhwelle ist aus einem Hohlzylinder (Rohr) und zwei in diesen eingedrückten Tampons (mit Lagerzapfen) zusammengesetzt. Im Bereich des Hemmungsrades ist das Rohr auf etwas mehr als die Hälfte seines Umfanges beschnitten. Das Hemmungsrad hat eine kronenartige Form, seine Funktionselemente für das Hemmen und Heben – die Schuhe – befinden sich in einer zweiten Ebene. Die Schuhspitze liegt in den Ruhephasen (Hemmungsrad bewegt sich nicht) an der Zylinderinnen- bzw. -außenfläche an. Die äußere Schuhseite ist als Hebefläche gestaltet. Ein Zahnschuh hat Platz im Rohr. Die Innenfläche des Zylinders wirkt als Ausgangsanschlag. Beim Rückdrehen des mit dem Gangregler verbundenen Teilrohres (Rinne) wird die Schuhspitze frei, das Hemmungsrad dreht sich weiter, wobei die Hebefläche des Schuhs auf die Ausgangskante der Rinne wirkt. Nach der Hebung fällt der nächste Schuh mit seiner Spitze auf die Außenfläche der Rinne (Eingangsanschlag).
Die Zylinderhemmung ist für tragbare Uhren mit Unruh vorgesehen. Armbanduhren mit Zylinderhemmung sind zwar nicht so genau wie solche mit Ankerhemmung, können aber bei ausreichender Schmierung zufriedenstellend arbeiten.[24] Um eine besonders große Schwingweite der Unruh zu ermöglichen, wirkt die Hemmung nur auf einen einzigen Hemmungsradzahn (Schuh). Dieser ist aus der Radebene mit Hilfe eines tragenden Stiels in die zweite Ebene gehoben (Zahnträger). Damit der Zylinder nicht an den Raddorn stößt, ist der Zylinder in Höhe der Radebene nochmals beschnitten. Um ein Verhaken von Zahn und Zylinder zu verhindern, ist am Unruhreifen ein Prellstift befestigt, der in bei zu großer Schwingungsweite an einen auf der Platine angeordneten Anschlagstift (oft federnd) anschlägt. Die im Bild gezeigten Phasen 1 und 4 stellen die Endlagen (Umkehrpunkte) der Unruhschwingung dar.
Die beiden Funktionsflächen zur Hebung – Hebefläche und Gegenkante – sind gegenüber der Graham-Hemmung umgekehrt verteilt.
Die ursprüngliche Form der Hemmung wies keine Passage für den Raddorn auf. Wegen der Ähnlichkeit der Rinne mit einem zur Schweinefütterung verwendeten Trog wurde sie als Sautroghemmung bezeichnet.
Die Zylinderhemmung bei Armbanduhren wurde von etwa 1920 bis 1940 vor allem für billigere Modelle verwendet, danach wegen der schlechteren Ganggenauigkeit zugunsten der Ankerhemmung aufgegeben.[25]
Duplexhemmung

Duplexhemmung

Duplexhemmung (Prinzip)

Duplexhemmung (Funktion)

Es handelt sich um eine Hemmung für Kleinuhren mit Unruh-Spirale-Schwingsystem. Das Hemmungsrad der Duplexhemmung[26] hat zwei Zahnreihen in zwei Ebenen, die erste für das Hemmen (Ruhezähne), die zweite für das Heben (Stoßzähne). Hemmen und Heben finden nicht je zweimal, sondern nur je einmal pro Schwingung der Unruh statt (siehe Bilder, Unruh nicht dargestellt). Der Vorteil ist, dass die Hebung günstig, nämlich ziemlich in der Mittellage der Unruh, das heißt im Moment ihrer größten kinetischen Energie, erfolgt. Ein Anker ist nicht vorhanden. Die Hemmzähne legen sich während der Ruhe an einen mit der Unruh koaxialen Zylinder (Rolle) an, den sie durch einen Schlitz auf dem Zylinder passieren können, wodurch sich das Hemmungsrad weiterdrehen kann. Während des Falls (Weiterbewegung des Hemmungsrades) trifft ein Hebezahn auf den Hebearm (Hebelstein, Antriebsstein) an der Unruh und beschleunigt diese. Beim Rückschwung der Unruh entsteht eine geringe Rückführung, wenn der Ruhezahn den Rolleneinschnitt passiert (Phase 6).
Die Duplexhemmung wurde um 1730 von Jean-Baptiste Dutertre, nach anderen Quellen 1758 von Pierre Le Roy erfunden.[27][28] Sie wurde in Taschenuhren verwendet, was aber wegen des in der Praxis schwer beherrschbaren Passierens der Hemmzähne durch den Rollenschlitz bald aufgegeben wurde.
Kommahemmung

Kommahemmung (Aufbau)

Kommahemmung (Funktion)
Die Kommahemmung wurde für Kleinuhren mit Unruh-Spirale-Schwingsystem Mitte des 18. Jhd. von Jean Antoine Lépine entworfen.[29] Wie bei der Zylinder- und der Duplexhemmung bestand die Intention darin, Hemmungsrad und Schwingsystem direkt ohne ein vermittelndes Zusatzteil (Anker) zusammenarbeiten zu lassen. Dies war schon bei der Spindelhemmung der Fall, Zylinder-, Duplex- und Kommahemmung ermöglichten jedoch große Schwingungsweiten der Unruh und damit eine bessere Ganggenauigkeit. Von den drei genannten Hemmungen setzte sich die Zylinderhemmung durch, die im 19. Jhd. industriell in großer Zahl gefertigt wurde. Für präzisere Uhren kamen aber ab Mitte des 19. Jhd. Glashütter und Schweizer Ankerhemmungen zum Einsatz.
Der gravierende Nachteil der Kommahemmung besteht in der bei dieser Konstruktion nicht zu vermeidenden Reibung, die zu großem Verschleiß führte, so dass die Hemmung kaum Anwendung fand.
Der Aufbau der Hemmung ist aus nebenstehendem Bild ersichtlich. Das vom nicht dargestellten Laufwerk angetriebene Hemmungsrad HR weist an Trägerarmen TA befestigte abgeflachte Zylinderstifte ST (meist zwölf) auf. Bei Drehung des Hemmungsrades bewegen sich diese Stifte (deren Achsen) auf einer Kreisbahn, die durch die Achse der Unruhwelle führt. Die Unruhwelle besitzt deshalb im Bereich des Hemmungsrades einen Einschnitt, so dass nur noch ein kreissegmentförmiger Querschnitt KS verbleibt. Bei geeigneter Stellung der Unruhwelle stellt diese somit kein Hindernis für die Drehung des Hemmungsrades dar.
An der Unruhwelle ist im Bereich des Kreissegmentquerschnitts der für die Hemmung namensgebende kommaförmige Impulsfinger IF befestigt. Der Impulsfinger besitzt eine Ausnehmung mit der innenzylindrischen Fläche RFI, deren Achse mit der Achse der Unruhwelle zusammenfällt. Der Durchmesser dieser Fläche ist etwas größer als der Durchmesser der Stifte des Hemmungsrades. RFI ist die innere der beiden Ruheflächen des Impulsfingers. Die äußere ist die Fläche RFA. An eine der beiden legt sich während bestimmter Phasen der Unruhschwingung ein Stift des Hemmungsrades an und verhindert so dessen Drehung, was als Ruhe bezeichnet wird. Da sich die Unruh und damit der Impulsfinger aber auch während der Ruhe verdrehen, reibt der Stift auf der jeweiligen Ruhefläche („ruhereibend“ lautet der Fachausdruck). Die Fläche HF des Impulsfingers kann als gewölbte schiefe „Ebene“ aufgefasst werden, durch die beim Entlanggleiten eines Hemmungradstiftes der Unruh ein Antriebsimpuls verliehen wird. Dies wird als Hebung bezeichnet und die Fläche heißt Hebefläche.
Die Funktion der Hemmung ist in nebenstehendem Bild dargestellt. In Phase 1 schwingt die Unruh entgegen der Uhrzeigerrichtung. Ein Stift des Hemmungsrades wird von der inneren Ruhefläche des Impulsfingers freigegeben. Die Hebung erfolgt bei Bewegung des Hemmungsrades in Phase 2, wenn der Stift auf der Hebefläche gleitet (beim Rückschwung der Unruh findet keine Hebung statt, d. h., der Unruh wird ein einseitiger Antriebsimpuls verliehen). In Phase 3 hat sich das Hemmungsrad soweit verdreht, dass der nachfolgende Stift an der äußeren Ruhefläche ruhereibend zur Anlage kommt. Die Unruh schwingt in Phase 4 bis zu ihrem Umkehrpunkt und bewegt sich in Phase 5 rückschwingend nunmehr in Uhrzeigerrichtung. Die Abmessungen von Hemmungsrad und Impulsfinger sind so gewählt, dass das Impulsfingerende ohne Berührung des Stiftes an diesem vorbeischwingen kann. In Phase 6 verlässt der Stift die äußere Ruhefläche und bewegt sich in die innere Ruhefläche (geringe Bewegung des Hemmungsrades). Hier wird beim Gleiten der Stiftebene auf einer Impulsfingerkante eine sehr kleine Hebung wirksam (schiefe Ebene). Während der weiteren Unruhbewegung verbleibt der Stift ruhereibend an der inneren Ruhefläche (Phase 7), wobei in Phase 8 der Umkehrpunkt der Unruh erreicht wird. Daran schließt sich wieder Phase 1 an. Während einer Unruhschwingung wird das Hemmungsrad somit um einen Stift („Zahn“) weitergeschaltet. Wie ein Vergleich der Phasen 4 und 8 zeigt, können Schwingungsweiten von nahezu 360° erreicht werden. Die begrenzenden Bedingungen bestehen darin, dass der Stift in den Umkehrpunkten der Unruh einerseits noch an der äußeren Ruhefläche anliegen muss (Phase 4) und andererseits das Kreissegment der Unruhwelle den Trägerarm des Stiftes nicht berühren darf (Phase 8).
Freie Hemmung
Bei einer Freien Hemmung befindet sich zwischen Hemmungsrad und Gangregler ein weiteres um eine eigene Achse hin und her drehendes Teil. Dieses Teil ist der Anker oder ein ähnliches Teil mit anderem Namen. In der Ruhephase des Hemmungsrades ist es vom Gangregler entkoppelt und ebenso wie das Hemmungsrad in Ruhe. Die bei der Ruhenden Hemmung in dieser Phase vorhandene Reibung zwischen den Hemmteilen entfällt, die Schwingung des Gangreglers wird weniger gestört, er schwingt „frei“. Die notwendige Kopplung von Gangregler und Hemmungsrad besteht nur in den Phasen der Hebung und des nächsten Falls eines Hemmzahnes. Diese Kopplung erfolgt in der Nähe der Mittellage des Gangreglers, also dann, wenn ein Impuls auf den Gangregler nur wenig Einfluss auf seine Periodendauer hat. Dabei treten aber auch geringe Reibungsverluste auf; die Reibung zwischen den Hemmteilen kann nicht gänzlich vermieden werden.
Englische Ankerhemmung oder Spitzzahnankerhemmung

Spitzzahnankerhemmung
Spitzzahnankerhemmung (Prinzip)

Es handelt sich um eine Hemmung für Kleinuhren mit Unruh-Spirale-Schwingsystem. Sie wurde 1757 von Thomas Mudge als erste freie Hemmung erfunden und war lange Zeit die beste Hemmung für tragbare Uhren.[30]
Die Funktion der Hemmung ist die gleiche wie die der Schweizer Ankerhemmung und dort beschrieben.
Die Verbindungsgeraden der Drehpunkte (Achsen) von Hemmungsrad und Anker sowie von Unruh und Anker stehen senkrecht aufeinander (im Gegensatz zur Glashütter und Schweizer Ankerhemmung). Der Anker A bestand ursprünglich aus einem Teil, später jedoch aus zwei Metallteilen, dem massiven Ankerkörper AK und der Ankergabel AG (siehe Bild). Bei der Montage der Hemmung konnten Ankergabel und Ankerkörper um die Ankerachse DA relativ zueinander verdreht werden, um die richtigen Eingriffsverhältnisse zum Hemmungsrad und zur Unruh herzustellen. Beide Teile wurden danach durch Verstiften fest miteinander verbunden (Stift VS).
Die Hemmelemente H (Paletten) sind integraler Bestandteil des Ankerkörpers und besitzen Anschlagflächen RF (Ruheflächen) und schiefe Ebenen HF (Hebeflächen).[31] Das Hemmungsrad HR ist mit Spitzzähnen versehen. Bei Drehung des vom Laufwerk angetriebenen Hemmungsrades gleiten die Zahnspitzen auf den schiefen Ebenen (der Hebung) der Paletten und übertragen so einen Antriebsimpuls auf den Anker und damit die Unruh. Man sagt in der Fachsprache, dass die Hebung bei dieser Hemmung auf den Paletten liegt.
Als Materialien kamen Stahl und Messing zum Einsatz. Spätere Versionen waren mit in den Ankerkörper eingelassenen Edelstein-Paletten versehen (verdeckt in waagerechten Schlitzen wie später auch bei der Glashütter Ankerhemmung, jedoch mit ebenen Hebeflächen). Für den Hebelstein HST wurde dann ebenfalls dieses Material verwendet.
Die beiden großen Nachteile der Hemmung bestehen darin, dass einerseits die Spitzzähne bei Erschütterungen, aber auch während der normalen Funktion leicht deformiert werden können und andererseits nur eingeschränkte Justagemöglichkeiten vorhanden sind. Auch die Schmierung der Hemmung (Dauerschmierung) ist mangelhaft. Die Hemmung war deshalb ab Mitte des 19. Jahrhunderts gegenüber der Glashütter Ankerhemmung und später gegenüber der Schweizer Ankerhemmung nicht mehr konkurrenzfähig.
Glashütter Ankerhemmung

Glashütter Ankerhemmung (Prinzip)

Glashütter Ankerhemmung (Ölproblem)

Glashütter Ankerhemmung (Kolbenzahn)
Es handelt sich um eine Hemmung für Kleinuhren (tragbare Uhren) mit Unruh-Spirale-Schwingsystem. Da die Wellen von Hemmungsrad, Anker und Unruh auf einer geraden Linie liegen, spricht man von einer Hemmung in gerader Anordnung.[32]
Die Hemmung wurde Mitte des 19. Jahrhunderts von Ferdinand Adolf Lange in Glashütte/Sachsen entwickelt.[33] Sie weist erstmals alle Merkmale auf, die eine Hemmung für tragbare Uhren hoher Ganggenauigkeit geeignet machen. Diese Merkmale werden, wie auch die Funktion, die die gleiche ist wie die der später entwickelten Schweizer Ankerhemmung, bei der Beschreibung der letzteren erläutert. Hier werden nur einige Besonderheiten der Hemmung beschrieben (siehe Bild).
Anker A, dessen Schwerpunkt in seiner Drehachse DA liegt, und Hemmungsrad HR wurden aus einer Goldlegierung gefertigt, die durch ein besonderes Verfahren (Hämmern) verschleißfest gemacht wurde. Außerdem griff diese Legierung das zur Schmierung der Hemmung notwendige Öl chemisch nicht an.
Die Begrenzung der Ankerbewegung erfolgt durch einen am Anker befestigten Begrenzungsstift BS, der in eine Bohrung der Grundplatte (Platine) hineinragt und sich in den Endlagen an die Bohrungswandung anlegt.[34] Die Edelstein-Hemmelemente H (Paletten) sind in waagerechte Schlitze im Anker eingelassen, so dass sie von oben (also im eingebauten Zustand der Hemmung) kaum sichtbar sind. Die Paletten sind mit einer zylindrisch gewölbten Fläche, auf der die Zähne des Hemmungsrades gleiten, versehen. Nur die gewölbte Fläche ragt aus der Ankerfassung hervor. Das Hemmungsrad trägt Kolbenzähne. Diese weisen wie die Paletten eine schiefe Ebene auf. Je nachdem, ob die Kante der Palette auf der Zahnebene oder die Kante (bzw. Rundung) des Zahns auf der Palettenebene gleitet, spricht man davon, dass die Hebung auf der Palette oder auf dem Zahn des Hemmungsrades liegt. Der Vorteil von Kolbenzähnen besteht darin, dass einerseits der Gefahr der Verformung der Zähne (wie die bei der Spitzzahnhemmung) entgegengewirkt und andererseits die Hebung des Ankers vergrößert wird. Die dem Anker bzw. der Unruh zugeführte Energie wird also (bei gleichem Laufwerkdrehmoment) vergrößert (bzw. muss das Laufwerk bei bestimmtem erforderlichem Antriebsimpuls ein geringeres Drehmoment liefern).
Die Bezeichnung Kolbenzähne geht auf die Ähnlichkeit dieser (in ersten Ausführungen abgerundeten) Zähne mit einer Keule, früher auch als Kolben bezeichnet, zurück (siehe Bild).
Während der Hebung (Gleiten eines Zahnes auf der gewölbten schiefen „Ebene“ der Paletten) entsteht ein sehr kleiner (veränderlicher) Winkel α zwischen der geölten Palette und einem Zahn des Hemmungsrades (siehe Bild), der während dieses Vorgangs ausgangsseitig sogar den Wert null durchläuft. Einesteils ist dieser Winkel erwünscht, da durch die Kapillarwirkung dieses Keils Öl an die Berührungsstelle (Stelle der Reibung) von Palette und Zahn befördert wird. Wären die Palettenflächen nicht gewölbt, stünden sich aber zwei ebene Flächen gegenüber, die dazu neigen, aneinander zu kleben (Adhäsion). Das würde sich insbesondere bei im Laufe der Zeit eintretenden Viskositätsveränderungen des Öls negativ auswirken (so zumindest die Befürchtung). Die Wölbung der Paletten unterdrückt wirksam die Adhäsion.
Nicht ganz klar ist, warum die Palettenwölbung mit der Ankerfassung abschließt. Die Paletten könnten prinzipiell auch ein Stück vorstehen. Evtl. hat dabei wiederum die Ölproblematik eine Rolle gespielt. Der Bereich zwischen Wölbungsende und Ankerfassung könnte als Öldepot fungieren und das Öl wiederum durch die Keil-Kapillarwirkung zur Reibstelle befördert werden (im Bild schematisch dargestellt).
Der große Nachteil der Hemmung bestand darin, dass sie im eingebauten Zustand nicht justiert werden konnte (Verschieben der Paletten; Begrenzung) und auch nur wenige Justiermöglichkeiten vorhanden waren. Um die Justage durchzuführen, war jedes Mal ein Ausbau der Hemmung und ein erneuter Einbau zur Überprüfung der Justage notwendig. Auch erforderte diese Arbeiten großes Geschick (z. B. Setzen des Begrenzungsstiftes, Tarieren des Ankers). Das führte in der Folge zur Entwicklung der Schweizer Ankerhemmung, die eine wesentlich vereinfachte Justage und damit die Voraussetzungen für eine Serienfertigung bot.
Schweizer Ankerhemmung

Schweizer Ankerhemmung (Prinzip)
Schweizer Ankerhemmung mit Ankerrad sowie Anker mit Gabel und Ankerwelle, Sicherheitsmesser nicht gezeichnet
Schweizer Ankerhemmung (Funktion)

Schweizer Ankerhemmung (Ankerarme)

Schweizer Ankerhemmung (Hebung)

Schweizer Ankerhemmung (Sicherung)

Schweizer Ankerhemmung (Kolbenzahn)
Die Schweizer Ankerhemmung[35] zeichnet sich durch die spezielle Form von Anker und Gangrad aus, wodurch sich der Antrieb auf die Ankersteine (Paletten) und Hebeflächen der Ankerrad-Zähne verteilt und somit die Herstellung hochpräziser Armbanduhren ermöglicht.[36] Sie entwickelte sich Ende des 19. Jhd./Anfang 20. Jhd. in Deutschland aus der Glashütter Ankerhemmung. Die ursprüngliche Bezeichnung war Kolbenzahnhemmung. In der Schweiz wurden Uhren mit dieser Hemmung dann serienmäßig gefertigt, so dass sich der Name Schweizer Ankerhemmung durchsetzte.
Diese Hemmung wird, abgesehen von sehr billigen Uhren, bei den meisten tragbaren mechanischen Uhren (Armbanduhren, Taschenuhren) mit Unruh-Spirale-Schwingsystem eingesetzt, kommt aber auch für größere, wie Wecker, Tischuhren etc. zur Anwendung.
Die Wellen von Hemmungsrad, Anker und Unruh liegen auf einer geraden Linie. Deshalb spricht man von einer Hemmung in gerader Anordnung.
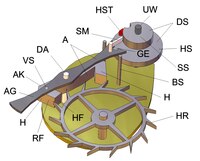
In ein aus gehärtetem Stahl bestehendes Kolbenzahn-Hemmungsrad HR (siehe Bild), das vom Laufwerk angetrieben wird, greifen wechselweise zwei vorzugsweise aus synthetischem Rubin gefertigte Hemmelemente (Paletten) H ein.[37] Diese besitzen eine Anschlagfläche (Ruhe) RF und eine schiefe Ebene (Hebung) HF. Die Paletten sind an einem Anker A befestigt, der sich um die Drehachse DA bewegen kann. Der Anker besteht meist auch aus Stahl, es kommen jedoch auch andere Werkstoffe zum Einsatz. Die Bewegung des Ankers wird durch zwei Begrenzungsstifte BS begrenzt. Auch andere Begrenzungen sind gelegentlich anzutreffen. Fest verbunden mit der Unruhwelle UW ist eine Doppelscheibe DS, die aus der Hebelscheibe HS und der Sicherheitsscheibe SS (oder Sicherheitsrolle) besteht. An der Hebelscheibe ist der Hebelstein (Ellipse) HST befestigt. Auch dieser besteht meist aus synthetischem Rubin. Bei Bewegung der Unruh um ihre Drehachse kann der Hebelstein in einen Einschnitt GE der Ankergabel eingreifen, so dass die Bewegungen der Unruh und des Ankers sich gegenseitig beeinflussen können. Das Sicherheitsmesser (Sicherheitsstift) SM hat eine die Ruhelage des Ankers sichernde Funktion.
Die Hemmungsfunktion geht aus nebenstehendem Bild hervor. In Phase 1 bewegt sich die Unruh (nicht dargestellt), von ihrem Umkehrpunkt zurückschwingend, entgegen der Uhrzeigerrichtung. Ein Zahn des Hemmungsrades liegt an der Ruhefläche der Eingangspalette an, so dass das Rad an seiner Bewegung gehindert wird. Ein Begrenzungsstift verhindert die Bewegung des Ankers entgegen der Uhrzeigerrichtung um seine Drehachse. Das Sicherheitsmesser befindet sich sehr nahe an der Sicherheitsscheibe, berührt diese jedoch nicht. In Phase 2 bewegt sich der Hebelstein in den Ausschnitt der Ankergabel und verdreht dadurch den Anker. Das Sicherheitsmesser behindert diese Bewegung nicht, da die Sicherheitsscheibe mit einer Ausnehmung versehen ist. Der Anker bewegt sich vom Begrenzungsstift weg und hebt die Eingangspalette (erste Ankerpalette in Drehrichtung des Hemmungsrades) an. Da das Hemmungsrad, vom Laufwerk angetrieben, eine Kraft auf die Palette ausübt, wirkt dabei eine Reibkraft. Diese ist zu überwinden und die Unruh muss die sogenannte Auslösearbeit verrichten. Die Auslösearbeit stellt eine Störung der freien Schwingung der Unruh dar und sollte deshalb so klein wie möglich sein. Der Weg w, den die Palette auf dem Zahn bei der Auslösung zurücklegen muss, ist deshalb sehr klein gehalten. Am Ende der Auslösung verdreht sich das Hemmungsrad, eine Kante des Zahnes gelangt auf die Hebung der Palette und gleitet auf dieser, wodurch der Anker weiterbewegt wird und über den Hebelstein der Unruh einen Antriebsimpuls verleiht. In Phase 3 verlässt der Zahn die Palette und das Hemmungsrad bewegt sich solange, bis ein anderer Zahn an die Ruhefläche der Ausgangspalette anschlägt. Der Anker legt sich an den nunmehr anderen Begrenzungsstift, der Hebelstein verlässt den Gabeleinschnitt und die Unruh schwingt frei bis zu ihrem Umkehrpunkt (Phase 4). Das Sicherheitsmesser befindet sich nahe der Sicherheitsscheibe, berührt diese jedoch nicht. In Phase 5 schwingt die Unruh nun in Uhrzeigerrichtung und der Hebelstein bewirkt die Auslösung an der Ausgangspalette, wobei wieder die Auslösearbeit von der Unruh aufzubringen ist. Beginnend mit Phase 6 verdreht sich das Hemmungsrad und ein Zahn gleitet wiederum auf der Hebefläche, nun aber auf der der Ausgangspalette. Der Unruh wird ein Antriebsimpuls in Uhrzeigerrichtung erteilt. In Phase 7 ist der Vorgang beendet, der Hebelstein verlässt die Gabel und in Phase 8 schlägt wieder ein Zahn an die Eingangspalette an. Der Anker kommt am Begrenzungsstift zur Anlage. Damit ist wieder Phase 1 erreicht. Das Hemmungsrad hat sich um einen Zahn weitergedreht.
Damit die Hemmung für tragbare Uhren eingesetzt werden konnte, musste sie weitgehend erschütterungsresistent gestaltet werden. Das wird erreicht durch drei Konstruktionsmerkmale, die bereits bei der Spitzankerhemmung und der Glashütter Ankerhemmung gegeben waren.
- Zugwinkel (siehe Bild)
Die Paletten sind um einen bestimmten Winkel geneigt (Zugwinkel). Dadurch entstehen während der Ruhe durch die Kräfte F1 bzw. F2 des Ankerrades und die senkrechten Abstände dieser Kräfte a bzw. b zum Ankerdrehpunkt Drehmomente, die den Anker während der freien Schwingung der Unruh gegen die Begrenzungsstifte ziehen. Ggf. auf die Uhr wirkende Erschütterungen müssten, um eine Störung herbeizuführen, so groß sein, dass sie diese Drehmomente überwinden (also den Anker vom jeweiligen Begrenzungsstift lösen).
- Sicherheitsmesser
Sollte sich trotz des Zugwinkels der Anker aufgrund von Erschütterungen während der Ruhe vom Begrenzungsstift wegbewegen, so legt sich das Sicherheitsmesser SM an die Sicherungsscheibe an. Dies stört zwar durch die dabei entstehenden Reibkräfte kurzzeitig die Unruhschwingung und führt damit zu einer Gangabweichung, eine gravierende Funktionsstörung tritt jedoch nicht auf.
- Gabelhörner
Die sogenannten Gabelhörner GH des Ankers verhindern eine undefinierte Bewegung des Ankers in der Phase, da sich das Sicherheitsmesser im Ausschnitt der Sicherheitsscheibe bewegt und somit nicht wirksam ist. Sie legen sich bei Erschütterungen der Uhr an den Hebelstein an, wodurch es zwar zur Gangabweichung, aber zu keiner Funktionsstörung kommt.
Ideal für die konstruktive Auslegung der Hemmung wäre, wenn die Antriebsimpulse und die Auslösearbeit in beiden Schwingungsrichtungen der Unruh gleich wären. Dies ist jedoch nicht einfach möglich. Die Größen sind abhängig von der Länge der Ankerarme. Soll die Auslösearbeit gleich sein, so müssen die Hebelarme c des Ankers für die Ruheflächen gleich lang sein (siehe Bild). Die Unruh muss dann bei der Auslösung gegen gleiche Drehmomente arbeiten. Wenn dagegen ein gleich großer Antriebsimpuls gewünscht wird, sind die Hebelarme zur Mitte der Hebeflächen maßgebend. Durch die Hebung werden dann gleiche Drehmomente an die Unruh gegeben. Der Auslösewiderstand stört den Isochronismus stärker als ungleiche Antriebsimpulse. Meist wird konstruktiv ein Kompromiss gewählt (ungleicharmiger Anker). Prinzipiell wäre es möglich, Auslösearbeit und Antriebsimpuls mit einer Hemmung zu symmetrieren. Dazu wäre bei einem Anker mit symmetrischer Hebung der Auslöseweg w ungleich zu justieren oder bei symmetrischer Auslösearbeit durch z. B. verschieden breite Paletten und/oder unterschiedliche Steigungen der Hebung das gewünschte Ergebnis herbeizuführen.
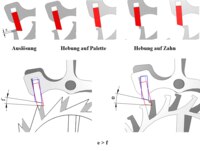
Das Hemmungsrad ist mit Kolbenzähnen versehen. Diese weisen wie die Paletten eine schiefe Ebene auf. Je nachdem, ob die Kante der Palette auf der Zahnebene oder die Kante (bzw. Rundung) des Zahns auf der Palettenebene gleitet, spricht man davon, dass die Hebung auf dem Zahn oder der Palette des Hemmungsrades liegt (siehe Bild). Der gesamte Hebungsvorgang setzt sich aus beiden zusammen, wobei der größere Teil auf der Palette liegt.
Der Vorteil von Kolbenzähnen besteht darin, dass einerseits der Gefahr der Verformung der Zähne (wie die bei der Spitzzahnhemmung) entgegengewirkt und andererseits die Hebung des Ankers vergrößert wird (e > f). Die dem Anker bzw. der Unruh zugeführte Energie wird also (bei gleichem Laufwerkdrehmoment) vergrößert (bzw. muss das Laufwerk bei bestimmtem erforderlichem Antriebsimpuls ein geringeres Drehmoment liefern).
Die Form der Kolbenzähne entstand durch schrittweise Modifizierung der Spitzzähne durch eine schiefe Ebene, Abrundung und Freimachung für die in das Hemmungsrad eintauchenden Paletten (siehe Bild). Die Ruhekante wird nicht verrundet, da der Auslöseweg unter visueller Kontrolle so besser eingestellt werden kann und die Auslösung exakter erfolgt. Die Bezeichnung Kolbenzahn geht auf die Ähnlichkeit mit einer Keule, früher auch als Kolben bezeichnet, zurück.
Die Hemmung muss geölt werden. Dazu wird eine geringe Menge Öl auf die Hebeflächen der Paletten gegeben (auch andere Methoden sind bekannt), das dort aufgrund der Adhäsion haftet. Der bei der Glashütter Ankerhemmung befürchtete negative Einfluss der Adhäsion ist vernachlässigbar, da die Menge des aufgebrachten Öls äußerst gering ist. Es wurden und werden immer wieder Versuche gemacht, durch geeignete Materialpaarungen die Hemmung ungeölt zu betreiben.[38]
Die Eignung der Hemmung für die Serienfertigung ist insbesondere durch die gegenüber der Glashütter Ankerhemmung wesentlich vereinfachte Justage begründet. Die Paletten können mit einfachem Werkzeug bei eingebautem Anker in den Ankerschlitzen verschoben und so der Gang eingerichtet werden. Der Anker wird dann nur einmal wieder ausgebaut und die Paletten werden mit Schellack lagegesichert. Auch die Begrenzungsstifte sind z. B. durch minimales Biegen justierbar (es sind auch als Exzenter um eine Achse drehbare Stifte bekannt). Diese Vorteile wie auch die Verwendung von Stahl statt einer Goldlegierung führten dazu, dass sich die Schweizer Ankerhemmung als Standard für präzise tragbare Uhren durchsetzte.
Für Uhrenfachleute:
Die Schweizer Ankerhemmung läuft, unterteilt nach Teilen, wie folgt:[39]
- Doppelrolle/Hebelscheibe: Ergänzungsbogen steigend, dann fallend (ca. 220° bis 270°) – Auslösung (ca. 8°) – Impuls vor und nach dem toten Punkt (ca. 30°) – Ergänzungsbogen steigend, dann fallend (ca. 220° bis 270°) usw.
- Anker: Ruhe – Auslösung (2° bis 4°) – Impuls (ca. 10°) – Verlorener Weg (Sicherheit vom Abfallen des Rades zum Begrenzungsstift) (30′ bis 1°) – Ruhe
- Rad: Ruhe – Geometrischer Rücklauf (0°15′) und dynamischer Rücklauf (0°0′15″) – Impuls (ca. 10°30′) – Äußerer oder Innerer Fall (1° bis 2°) – Ruhe
Stiftankerhemmung

Stiftankerhemmung, Funktionsmodell

Stiftankerhemmung (Prinzip)

Stiftankerhemmung (Ruhe, Hebung; Sicherung)

Bei der Stiftankerhemmung[40] greifen keine Ankersteine, sondern gehärtete, senkrecht stehende Stahlstifte in ein unkompliziert geformtes Ankerrad ein.[41] Die Stiftankerhemmung wurde 1798 von Louis Perron entwickelt. Georg Friedrich Roskopf modifizierte sie und produzierte das Stiftankerwerk in seiner Firma ab 1868 für seine Roskopfuhren in Serie.[42] Deshalb wird sie oft als Roskopfhemmung bezeichnet, obwohl ggf. die jeweilige Konstruktion gar nicht den von Roskopf eingeführten Änderungen entspricht.
Die Hemmung wurde für einfache tragbare Uhren (Armbanduhren, Taschenuhren) mit Unruh-Spirale-Schwingsystem eingesetzt und löste häufig die Uhren mit Zylinderwerk ab. Das Stiftankerwerk kam aber auch für größere, wie Wecker und Tischuhren zur Anwendung.
Sowohl die gerade Anordnung (die Achsen von Hemmungsrad, Anker und Unruh liegen auf einer geraden Linie) als auch rechtwinklige Ausführungen (wie bei der Spitzzahnhemmung) waren üblich.
In ein meist aus Messing bestehendes Hemmungsrad HR (siehe Bild), das vom Laufwerk angetrieben wird, greifen wechselweise zwei in einen Anker A (meist Messing) eingepresste gehärtete zylindrische Stahlstifte ein, die als Hemmelemente H fungieren. Der Anker kann sich um die Achse DA drehen. Die Bewegung des Ankers wird durch zwei Begrenzungsstifte BS begrenzt. Fest verbunden mit der Unruhwelle UW ist eine Doppelscheibe DS, die aus der Hebelscheibe HS und der Sicherheitsscheibe SS besteht. An der Hebelscheibe ist der halbrunde Hebelstein (Ellipse) HST befestigt. Auch dieser besteht meist aus Stahl. Bei Bewegung der Unruh um ihre Drehachse kann der Hebelstein in einen Einschnitt GE der Ankergabel eingreifen, so dass die Bewegungen der Unruh und des Ankers sich gegenseitig beeinflussen können. Das Sicherheitsmesser (Sicherheitsstift) SM hat eine die Ruhelage des Ankers sichernde Funktion.[43]
Die Zähne des Hemmungsrades sind mit schiefen Ebenen versehen, so dass beim Gleiten eines der beiden Stahlstifte auf einer dieser Ebenen durch die dadurch hervorgerufene Ankerbewegung (Hebung) ein Antriebsimpuls auf die Unruh übertragen wird. In der Fachsprache wird dies als auf dem Zahn liegende Hebung bezeichnet. Da aber zu Anfang auch die Zahnkante kurz auf dem Stahlstift gleitet (Hebung auf dem Stift), spricht man davon, dass bei der Stiftankerhemmung die Hebung überwiegend auf dem Zahn liegt (siehe Bild).
Die Funktion der Hemmung ist die gleiche wie die der Schweizer Ankerhemmung und dort beschrieben. Dabei ist nur zu beachten, dass statt Paletten Stahlstifte vorhanden sind und die jeweilige schiefe Ebene sich nicht auf der Palette, sondern auf dem Hemmungsradzahn befindet.
Auch die für tragbare Uhren notwendige Erschütterungsresistenz wird mit den gleichen Mitteln erreicht, wie bei der Schweizer Ankerhemmung beschrieben. Der Winkel α (hier Ruhewinkel genannt), durch den ein Drehmoment F·a um die Ankerachse entsteht, das den Anker während der freien Schwingung der Unruh an einen Begrenzungsstift zieht, ist jedoch vom Hemmelement auf den Hemmungsradzahn verlegt (siehe Bild).
Neben dem einfachen Aufbau (Stanz- und Drehteile) und den preiswerten Werkstoffen eignete sich die Hemmung auch durch die einfache Justage für die Serienfertigung von Uhren, an die keine hohen Qualitätsansprüche gestellt wurden. Die Justage konnte im eingebauten Zustand der Hemmung vorgenommen werden und beschränkte sich darauf, dass durch minimales Verbiegen der Begrenzungsstifte bzw. des Gabelhalses am Anker der Auslöseweg w (Ruhe) und der Antriebsimpuls näherungsweise symmetriert wurden. Oft wurde auch noch auf die Begrenzungsstifte verzichtet. Die Begrenzung der Ankerbewegung erfolgte dann dadurch, dass die Stifte auf den Zahngrund aufsetzten (z. B. bei Roskopf). Bei weniger erschütterungsempfindliche Uhren (z. B. Wecker) verzichtete man auch noch auf das Sicherheitsmesser (Sicherheitsstift) und gewährleistete die Funktion durch ein geeignet geformtes Gabelhorn GH, das sich an die Unruhwelle UW anlegte. Statt des Hebelsteins kam ein einfacher, in einen Arm der Unruh U eingepresster Stahlstift SST zur Anwendung. Die Unruhwelle war im Bereich des Horns halbrund (siehe Bild).
Roskopf verwendete Unruhwellen, auf die die Sicherheitsscheibe nicht aufgepresst war, sondern zusammen mit der Unruhwelle gedreht wurde und einen an ihr befestigten Finger FI trug (statt eines Hebelsteins). Eine Hebelscheibe war nicht vorhanden.
Stiftankerhemmungen wurden in den verschiedensten Varianten und in großer Stückzahl bis weit in das letzte Drittel des zwanzigsten Jahrhunderts für preiswerte, in ihrer Genauigkeit und Lebensdauer ab etwa 1970 oft unterschätzte[44] Uhren verwendet. Erst die massenhafte Produktion von Quarzuhren setzte dem ein Ende.
Chronometerhemmung

Chronometer von Le Roy
Chronometerhemmung von Le Roy (Prinzip)

Chronometerhemmung von Le Roy (Funktion)
Chronometerhemmung von Le Roy (Eingriff)


Chronometerhemmung von Earnshaw (Prinzip)

Chronometerhemmung

Es handelt sich um eine Hemmung für Kleinuhren mit Unruh-Spirale-Schwingsystem. Wegen ihrer Stoßempfindlichkeit erlangte sie größere Bedeutung nur für (kardanisch gelagerte) Marinechronometer, mit deren Hilfe auf hoher See die geografische Länge bestimmt werden konnte. Zwar wurden auch Taschenuhren mit dieser Hemmung gebaut. Die durch die Bewegung der Uhr hervorgerufenen Störungen führten aber dazu, dass sich für tragbare Uhren die robustere Schweizer Ankerhemmung durchsetzte. Mit der Einführung von Quarzuhren und der GPS-Navigation fand der Bedarf an mechanischen Chronometern ein Ende.
Die Chronometerhemmung wurde Mitte des 18. Jahrhunderts von Pierre Le Roy erfunden. Zusammen mit Ferdinand Berthoud vollendete er 1761 das erste Marinechronometer (Längenuhr, später Chronometer) Frankreichs. In England arbeiteten John Arnold und Thomas Earnshaw[45] an ähnlichen Konzepten. Um 1790 brachte Earnshaw die Hemmung in die bis zuletzt angewandten Formen.[46]
Während John Harrison etwa zur gleichen Zeit seine Marinechronometer H1 (1735) bis H4 (1759) mit rückführenden Hemmungen (Grashüpferhemmung, Spindelhemmung) ausstattete, stellte die Chronometerhemmung als freie Hemmung aus heutiger Sicht die wesentlich modernere Konzeption dar. Bei deren Entwicklung spielte eine Rolle, dass erste Bemühungen, die von Großuhren bekannte Ankerhemmung für Kleinuhren mit Unruh-Spirale-Schwingsystem anzuwenden, einige Schwierigkeiten offenbarte (Thomas Mudge erfand erst 1760 die Spitzzahnankerhemmung für tragbare Uhren). Bei Ankerhemmungen wird über schiefe Ebenen (Hebung) dem Schwinger ein Antriebsimpuls zugeführt (vgl. Schweizer Ankerhemmung). Die reibende Bewegung bei diesem Vorgang und die erforderliche Schmierung (mit den damals verfügbaren schnell alternden Ölen) wurde als hinderlich für die Fertigung präziser Kleinuhren erkannt. Man suchte deshalb nach Wegen, den Antriebsimpuls reibungsarm und schmiermittelfrei auf die Unruh zu übertragen.
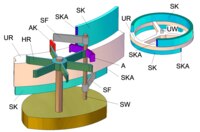
Die von Le Roy gewählte Lösung dieser Aufgabe ist aus nebenstehendem Bild ersichtlich. Ein vom Laufwerk angetriebenes Hemmungsrad HR kann mit einem Anschlagklötzchen AK und einem Anker A in Eingriff gebracht werden. Das Anschlagklötzchen ist, wie auch zwei mit verrundeten Schaltkanten SKA versehene Steuerkurven SK direkt auf dem Unruhreifen UR oder aber an einem zweiten Reifen, der fest mit der Unruhwelle UW (ober- oder unterhalb der Unruh) verbunden ist, angeordnet. Eine Schaltwelle SW trägt den Anker und zwei Steuerfinger SF, die mit den Steuerkurven zusammenarbeiten. Die Steuerfinger und der Anker sind in bestimmter Winkelanordnung fest mit der Welle verbunden.
Der Funktionsablauf ist folgender (siehe Bild). Die Unruh hat ihren Umkehrpunkt in Uhrzeigerrichtung überschritten und schwingt in Gegenrichtung, so dass sich das Anschlagklötzchen zum Hemmungsrad hin bewegt (Phase 1). Ein Zahn des Hemmungsrades liegt an der vorderen Ankerklaue an und erzeugt ein (sehr kleines) Drehmoment, das den oberen Schaltfinger OSF mit geringer Kraft an die obere Schaltkurve OSK drückt. Der Reifen UR (die Unruh) bewegt sich weiter und die Schaltkante SKA der unteren Schaltkurve verdreht den unteren Schaltfinger USF, so dass sich auch der obere Schaltfinger und der Anker A in Uhrzeigerrichtung bewegen (Phase 2 und 3). Die Unruh muss dabei die Auslösearbeit aufbringen, weil der Anker gegen den Reibungswiderstand des auf die Ankerklaue drückenden Zahns soweit verdreht werden muss, dass der Zahn freigegeben wird. Das Anschlagklötzchen befindet sich im Bereich eines Zahnes des sich nun verdrehenden Hemmungsrades, das am Ende dieses Vorgangs an der hinteren Ankerklaue anschlägt. Der mit dem Anschlagklötzchen im Eingriff stehende Zahn verleiht der Unruh einen Antriebsimpuls. In Phase 4 schwingt die Unruh bis zu ihrem Umkehrpunkt. Beim Rückschwung (Phase 5) bewegt sich das Anschlagklötzchen am Zahn vorbei, ohne diesen zu berühren. Die Schaltkante der oberen Schaltkurve erreicht den oberen Anschlagfinger und verdreht diesen. Wiederum muss die Unruh Auslösearbeit verrichten, da ein Zahn von der hinteren Ankerklaue zu lösen ist. Das Hemmungsrad bewegt sich und schlägt an der vorderen Ankerklaue an. Nachdem die Unruh wiederum den Umkehrpunkt durchlaufen hat, ist beim Zurückschwingen wieder Phase 1 erreicht.
Die Unruh erhält während einer Schwingung somit nur einen Antriebsimpuls, muss aber zweimal die Auslösearbeit verrichten. Das Hemmungsrad bewegt sich währenddessen in zwei Teilschritten um einen Zahn weiter. Während der Erteilung des Antriebsimpulses bewegt sich der Zahn auf dem Anschlagklötzchen verschiebend (zweimal um den Betrag v, siehe Bild) und dabei abrollend, was sich für die Weiterentwicklung der Hemmung als zweckmäßig erwies (meist keine Schmierung erforderlich). Dagegen wurde der Auslösemechanismus in späteren Versionen verändert. Dies hatte den Grund darin, dass die (wenn auch nur leicht) an den Steuerkurven schleifenden Schaltfinger und die zweimal notwendige Auslösearbeit die freie Unruhschwingung behinderten. Auch der komplizierte Aufbau und fehlende Justagemöglichkeiten sprachen gegen diese Konstruktion.
Earnshaw und Arnold lösten das Auslöseproblem mit einer äußerst filigranen Blattfeder F (als Goldfeder bezeichnet), die in einem sogenannten Ruhestück RS gefasst und bei a (nicht drehbar) eingespannt ist (siehe Bild). Im Bereich b wird die Feder Ruhefeder und im Bereich c Auslösefeder genannt. Das Ruhestück besitzt einen Anschlag RST für die Hemmungsradzähne, der später als halbrunder Stein (Ruhestein) ausgeführt wurde. Das Ruhestück selber legt sich durch eine leichte Vorspannung der Feder an den Anschlagstift AS an, der in nachfolgenden Konstruktionen durch eine Justierschraube ersetzt wurde. Auf der Unruhwelle ist eine Scheibe HS befestigt (Hebescheibe), die eine Ausnehmung mit der Anschlagfläche HST aufweist. Über diese Fläche wird vom Hemmungsradzahn der Antriebsimpuls auf die Unruh übertragen (analog zu Le Roy). Später wurde statt der Anschlagfläche ein Edelstein verwendet (der sogenannte Hebestein oder auch Impulsstein). Ferner ist an der Unruhwelle die Auslösescheibe ASB mit dem Auslösestein AST angebracht. Dieser veranlasst bei Schwingung der Unruh entgegen der Uhrzeigerrichtung die Auslösung, indem er die Feder und damit das Ruhestück auslenkt. Obwohl die Feder filigran ist, kann sie die zur Auslösung benötigte Kraft auf das Ruhestück übertragen, da sie nur sehr wenig über das Ruhestück hinausragt. Die Feder verbiegt sich bei Auslösung nur im Bereich b. Das Ruhestück hebt sich vom Anschlagstift ab und gibt so das Hemmungsrad frei. Beim Rückschwung der Unruh hebt der Auslösestein die Feder vom am Anschlagstift anliegenden Ruhestück ab und verbiegt sie im Bereich c. Die dadurch hervorgerufene Störung der Unruhschwingung ist vernachlässigbar, da wegen der nun wirksamen großen Federlänge eine äußerst geringe Kraft erforderlich ist.
Die Unruh erhält nur einen Auslöseimpuls pro Schwingung und muss (im Gegensatz zu Le Roy) auch nur einmal die Auslösearbeit verrichten.[47][48]
Schwerkrafthemmung von Denison (Westminstergang)

Denisonhemmung, 6-armig

Denisonhemmung (Prinzip)

Denisonhemmung (Funktion)

Bei der Schwerkrafthemmung von Denison,[49] die ausschließlich für Turmuhren verwendet wird, sperren zwei seitliche Hebel kurzzeitig und wechselweise das Hemmungsrad. Einer der Hebel wird beim Weiterdrehen des Hemmungsrades von diesem ein Stück ausgelenkt (angehoben). Der Hebel fällt von seinem Eigengewicht angetrieben wieder in seine Ausgangsstellung zurück, wobei er das Pendel vor sich her schiebt und diesem kinetische Energie übergibt.
Der Denisongang ist in Turmuhren in England verbreitet, unter anderem wird in der Turmuhr des Big Ben des Palace of Westminster ein „doppelter dreiarmiger Denisongang“ verwendet.
Der Aufbau der Hemmung ist aus nebenstehendem Bild ersichtlich (auch andere Ausführungen sind bekannt).
Im Gestell (nicht dargestellt) sind die Wellen bzw. Achsen D (für das Pendel P), DH (für die Hebelarme HA) und die Hauptwelle HW gelagert. Die Anschlagstifte AS sind am Gestell befestigt. Mit der Hauptwelle fest verbunden sind zwei dreiarmige Schaltsterne SST und ein Flansch, der drei um 120° versetze Schaltnocken SN trägt. Die beiden Schaltsterne sind um 60° gegeneinander versetzt. Die Hauptwelle mit ihren Bestandteilen entspricht dem Hemmungsrad bei anderen Hemmungen, also dem letzten Rad eines Laufwerks, das sich in zeitgleichen Schritten bewegen soll. Die Hebelarme besitzen jeweils eine Schaltnase SNA mit Anschlagflächen (als schiefe Ebene wirkend) für die Schaltnocken und einen Hebelstift HS. An jedem Hebelarm ist ein Anschlag H (Hemmelement) angebracht, wobei sich dieser bei einem Arm an der Vorderseite und beim anderen auf der Rückseite befindet. Die beiden Schaltsterne sind so auf der Hauptwelle angeordnet, dass sie bei Verdrehung von den Anschlägen gehemmt werden können. Die Bewegung der Hebelarme wird von zwei Anschlagstiften AS begrenzt. Oft ist zur Dämpfung der Drehung der Hauptwelle auf dieser ein Windfang W angebracht (ggf. auch auf einer über Zahnräder von der Hauptwelle angetriebenen zweiten Welle). Im Idealfall drehen sich Pendel und Hebelarme um eine gemeinsame Drehachse. Aus konstruktiven Gründen sind aber meist getrennte Drehachsen vorhanden. Das hat zur Folge, dass beim Pendelausschlag eine (kleine) Relativbewegung zwischen Hebelstift und Pendelarm stattfindet, durch die geringe Reibungsverluste entstehen.
In Phase 1 (siehe Bild) durchläuft das Pendel seine Mittellage entgegen dem Uhrzeigersinn. Die Hauptwelle hat sich soweit verdreht, dass ein Arm des vorderen Schaltsterns am Anschlag des rechten Hebelarms anliegt. Bei dieser Bewegung hat ein Schaltnocken über die Anschlagfläche der Schaltnase des rechten Hebels diesen von seinem Anschlagstift abgehoben (Zufuhr potentieller Energie). Das Pendel kann zunächst bis zur gelb markierten Position schwingen, ohne den Hebelarm anheben zu müssen und schwingt danach mit dem aufliegenden Hebel bis zum Umkehrpunkt (Phase 2). Dabei löst sich ein Arm des vorderen Schaltsterns vom Anschlag und die vom Laufwerk angetriebene Hauptwelle verdreht sich, bis ein Arm des hinteren Schaltsterns am hinteren Anschlag (nicht sichtbar) des linken Hebels anliegt. Der linke Hebelarm wird durch einen Schaltnocken angehoben. Das Pendel bringt die sogenannte Auslösearbeit auf, da zum Verschieben des Anschlags auf dem Schaltsternarm wegen der dabei auftretenden Reibung eine Kraft erforderlich ist. Dem Pendel wird also Energie entzogen. Da noch weitere Verluste auftreten (z. B. Lagerreibung), muss dem Pendel periodisch Energie zugeführt werden, um die Schwingungsweite aufrechtzuerhalten. Das erfolgt beim Rückschwung (Phase 3), nachdem das Pendel seinen Umkehrpunkt durchlaufen hat. Das Pendel erreicht wieder die gelb markierte Position, bis zu der das Pendel beim Hinschwung ohne aufliegenden Hebel schwingen konnte. Der Hebelarm liegt nun aber weiterhin auf dem Pendel, da kein Schaltnocken mehr die Hebelbewegung behindert und beschleunigt dieses aufgrund seines Gewichts (deshalb Schwerkrafthemmung) in Uhrzeigerrichtung, bis er am Anschlagstift anschlägt. Dem Pendel wird ein Antriebsimpuls (kinetische Energie) erteilt.
Das Pendel verrichtet in Phase 4 die Auslösearbeit am linken Anschlag. Beim Rückschwung erhält es einen Antriebsimpuls entgegen der Uhrzeigerrichtung. Phase 5 entspricht wieder Phase 1. Nach jeder Pendelschwingung hat sich die Hauptwelle (das Hemmungsrad) 120° weitergedreht.
Ein Video und eine Animation sind unter [50] zu finden.
(siehe zu dieser Hemmung auch: Zwischenaufzug)
Freie Federkrafthemmung von Riefler

Freie Federkrafthemmung von Riefler (Prinzip)
Freie Federkrafthemmung von Riefler (Funktion)

Freie Federkrafthemmung von Riefler für Unruh-Schwinger (Prinzip)

Freie Federkrafthemmung von Riefler

Diese Hemmung wurde 1889 von Sigmund Riefler für Präzisionspendeluhren entwickelt.[51][52]
Das Prinzip der Hemmung ist sowohl für Pendeluhren als auch für Uhren mit Unruh-Spirale-Schwingsystem anwendbar. Bedeutsam wurde die Hemmung allerdings nur für Pendeluhren.
Die Hemmung gewährleistet eine weitestgehend störfreie Schwingung des Schwingers.
Der Aufbau[53] der Hemmung für Pendeluhren ist aus der nebenstehenden Prinzipdarstellung ersichtlich. Ein Pendel P schwingt um die Drehachse D. Die Drehachse wird durch ein Schneidenlager, bestehend aus zwei am Gestell G befestigten Prismen PR und einer Schneide SN gebildet. Die Prismen sind sehr flach ausgeführt (beispielsweise in Achatplatten geritzte Keilnuten). Um ein Verrutschen der Schneiden (und damit des Ankers) zu verhindern, sind an den Prismen an jeweils einem Nutende (im Bild nicht dargestellte) begrenzende Seitenplatten befestigt[54]. Mit der Schneide ist fest ein Anker A verbunden, der zwei halbrunde Hemmelemente (Paletten) H trägt. Diese greifen wechselweise in zwei auf einer gemeinsamen Welle befestigten Hemmungsräder RR (Ruherad) und HR (Hebungsrad) ein. Die Hemmungsräder werden vom Laufwerk angetrieben. Aus der Anordnung der Verzahnung der Hemmungsräder zueinander ergibt sich eine resultierende Kontur RK, die für die Zusammenwirkung mit den Hemmelementen maßgeblich ist. Es hätte auch nur ein Hemmungsrad verwendet und mit dieser Kontur versehen werden können, wäre fertigungstechnisch aber wahrscheinlich schwieriger als die Verwendung zweier Räder gewesen. Von der Verzahnung beider Räder werden nur Teilbereiche wirksam, nämlich die schiefen Ebenen HF (Hebeflächen) und die Anschläge RF (Ruheflächen). Das Pendel P ist über zwei Pendelfedern PF (Blattfedern) mit der Schneide verbunden. Allgemein bewegen sich die Enden von Blattfedern bei kleinen Auslenkungen näherungsweise auf einer Kreisbahn, deren Mittelpunkt sich aber nicht an der Einspannstelle, sondern ein Stück davor befindet. Die Federn sind deshalb in der Schneide so eingespannt, dass dieser sogenannte Biegepunkt (Biegeachse) mit der Achse D des Schneidenlagers und somit auch des Ankers zusammenfällt. Außer den Federn gibt es keine weitere Verbindung des Pendels mit dem Anker. Die zur Aufrechterhaltung der Schwingung notwendige Energie wird ausschließlich über die Federn übertragen. Die Federn sind ca. 0,1 mm dick.
In Phase 1 (siehe Bild) schwingt das Pendel im Uhrzeigersinn und befindet sich nahe seiner Mittellage. Das eingangsseitige Hemmelement hat die Ruhefläche des Hemmungsrades verlassen. Das ausgangsseitige Hemmelement befindet sich am Anfang der Hebefläche. Das Hemmungsrad bewegt sich und verschiebt das ausgangsseitige Hemmelement, das am Ende dieser schnellen Bewegung an der Ruhefläche zur Anlage kommt (Phase 2). Der Anker wurde entgegen der Uhrzeigerrichtung verdreht und hat dadurch die Pendelfeder so gespannt, dass sie eine rücktreibende Kraft entgegen der Uhrzeigerrichtung auf das Pendel ausübt. Das Pendel schwingt nun weiter bis zu seinem Umkehrpunkt (Phase 3). Die Blattfeder wird dadurch noch stärker gespannt und entzieht dem Pendel kinetische Energie. Beim Rückschwung des Pendels wird diese Energie von der Blattfeder an das Pendel zurückgegeben. Bei Phase 4 sind die entzogene und die zurückgelieferte Energie gleich groß. Dem Pendel wurde also zwischen Phase 2 und Phase 4 keine resultierende Energie zugeführt. Die Blattfeder steht aber noch unter der Spannung, die ihr durch die Hebung zugeführt wurde. Diese treibt das Pendel nun weiter entgegen der Uhrzeigerrichtung und erteilt ihm somit nunmehr einen Antriebsimpuls. Zwischen Phase 4 und Phase 5 hat sich die Feder entspannt (Ende der Energiezufuhr), wird nun aber durch das Pendel (nicht durch den Anker) leicht in Gegenrichtung gespannt, was zu einer Ankerbewegung entgegen der Uhrzeigerrichtung und damit zum Lösen des Hemmelements vom Zahn führt (Auslösearbeit). Um diese so gering wie möglich zu halten (Störfaktor), sind die Ruheflächen sehr klein. Das eingangsseitige Hemmelement bewegt sich nun auf der Hebefläche. Die Feder wird in der das Pendel rücktreibenden Richtung gespannt (Phase 6). Das Pendel schwingt bis zum Umkehrpunkt (Phase 7) und erreicht in Phase 8 den Beginn der Abgabe des Antriebsimpulses in Gegenrichtung an das Pendel. Es schließt sich nun wieder Phase 1 an. Die Schwingungsweite des Pendels ist in der Realität sehr viel kleiner als hier zur Verdeutlichung dargestellt (ca. 3°).
Die mit dieser Hemmung von der Firma Clemens Riefler gefertigten Uhren sollen mittlere Gangabweichungen von ca. 0,01 Sekunden pro Tag erreicht haben.
Bei der Ausführung der Hemmung für ein Unruh-Spirale-Schwingsystem (siehe Bild) ist der Anker drehbar gelagert und kann sich wie die Unruh um die Achse D verdrehen. Statt einer Spirale ist eine Wendelfeder F vorgesehen. Das äußere Ende der Feder ist an einem Klötzchen K, das vom Anker auf einer Kreisbahn bewegt wird, befestigt, während das innere Federende (wie üblich) mit der Unruhwelle verbunden ist. Die Funktion ist die gleiche wie bei der Pendelvariante. Das Klötzchen wird durch den Anker während der Hebung entgegen der jeweiligen Drehrichtung der Unruh bewegt und verleiht der Unruh, wie beim Pendel beschrieben, einen Antriebsimpuls.[55]
Die freie Federhemmung gewährleistet, im Gegensatz zu einer weitverbreiteten Annahme, keine konstante Schwingungsweite des Schwingers bei sich veränderndem Drehmoment des Laufwerkes. Dem Schwinger müsste dazu eine konstante Leistung zugeführt werden, d. h., die Hebung müsste immer in der exakt gleichen Zeit erfolgen. Das ist aber bei variierendem Laufwerkdrehmoment nicht der Fall.
(siehe zu dieser Hemmung auch: Zwischenaufzug)
Freie Federkrafthemmung von Strasser
Freie Federkrafthemmung von Strasser

Strasserhemmung (Prinzip) H Hemmelement; HR Hemmungsrad; P Pendel; A Anker; F Antriebsfeder; HF Hebefläche; RF Ruhefläche; D Drehachse von P, F, A; B Eingriff Anker-Feder

Strasserhemmung (Details) R Rahmen; SP Stahlspitze; LS Lochstein; F Antriebsfedern; PF Pendelfedern;P Pendel; D Ankerachse; G Gestell; E1, E2 Einspannungen

Strasserhemmung (Doppelpaletten)

Die freie Federkrafthemmung wurde 1900 von Ludwig Strasser entwickelt (Patent D.R.G.M. 258 167) und besitzt am Anker auf jedem Arm doppelte Palettensteine, je einen für die Hemmung (Ruheklaue) und einen für die Hebung (Hebeklaue). Die Hebeklaue und die Zähne des Gangrads sind wie bei der Graham-Hemmung geformt.[56][57]
Diese Pendeluhrhemmung gewährleistet eine weitestgehend störfreie Schwingung des Pendels.
Die Funktion der Hemmung ist aus der nebenstehenden Prinzipdarstellung ersichtlich. Ein Pendel P schwingt um die Drehachse D. Der Anker A trägt zwei Hemmelemente H (Paletten), die Hebeflächen HF (Schiefe Ebenen) und Ruheflächen RF (Anschläge) aufweisen und wechselweise in das Hemmungsrad HR eingreifen. Im Drehpunkt D ist eine Blattfeder F (Antriebsfeder) in das Pendel eingespannt (real etwas versetzt, s. u.), die bei B über einen Ankerausleger mit dem Anker verbunden ist. Eine weitere Verbindung des Pendels mit dem Anker gibt es nicht. Die zur Aufrechterhaltung der Schwingung notwendige Energie wird ausschließlich über die Antriebsfeder übertragen.
In Phase 1 schwingt das Pendel im Uhrzeigersinn und befindet sich nahe seiner Mittellage. Die Blattfeder ist gestreckt, also ohne Spannung. Ein Zahn des Hemmungsrades befindet sich am Anfang der Hebefläche des ausgangsseitigen Hemmelementes. Das eingangsseitige Hemmelement ist außer Eingriff. Der Zahn des Hemmelementes wirkt nun auf die Hebefläche, wodurch der Anker verdreht und die Blattfeder gegen das Pendel verspannt wird. Dieser Vorgang, an dessen Ende der Zahn an der Ruhefläche anliegt, erfolgt sehr schnell, so dass sich das Pendel dabei nur wenig weiterbewegt (Phase 2). Das Pendel schwingt nun weiter bis zu seinem Umkehrpunkt. Die Blattfeder wird dadurch noch stärker gespannt und entzieht dem Pendel kinetische Energie (Phase 3). Beim Rückschwung des Pendels wird diese Energie von der Blattfeder an das Pendel zurückgegeben. Bei Phase 4 sind die entzogene und die zurückgelieferte Energie gleich groß. Dem Pendel wurde also zwischen Phase 2 und Phase 4 keine resultierende Energie zugeführt. Die Blattfeder steht aber noch unter Spannung und treibt das Pendel nun weiter entgegen der Uhrzeigerrichtung und erteilt ihm somit nunmehr einen Antriebsimpuls. Zwischen Phase 4 und Phase 5 hat sich die Feder entspannt (Ende der Energiezufuhr), wird nun aber durch das Pendel (nicht durch den Anker) leicht in Gegenrichtung gespannt, was zum Lösen des Hemmelements vom Zahn führt (Auslösearbeit). Nach dem Lösen ist die Feder zwar kurzzeitig wieder entspannt (Phase 6), wird aber sofort vom eingangsseitigen Hemmelement erneut gespannt (Phase 7). Das Pendel muss nun wieder bis zum Umkehrpunkt gegen die Feder Arbeit leisten (Phase 8), schwingt dann mit Federunterstützung zurück (Phase 9), erhält einen Antriebsimpuls in Gegenrichtung und löst in Phase 10 das Hemmelement vom Zahn. Die Schwingungsweite des Pendels ist in der Realität sehr viel kleiner als hier zur Verdeutlichung dargestellt (ca. 3°).
Zur konstruktiven Umsetzung des Prinzips siehe nebenstehendes Bild. Wie bei präzisen Pendeluhren meist üblich, wurde eine doppelte Blattfederaufhängung PF verwendet. Allgemein bewegen sich die Enden von Blattfedern bei kleinen Auslenkungen näherungsweise auf einer Kreisbahn, deren Mittelpunkt sich aber nicht an der Einspannstelle, sondern ein Stück davor befindet. Die Federn sind deshalb im Gestell G so eingespannt, dass dieser sogenannte Biegepunkt (Biegeachse) mit der Achse D des Ankers zusammenfällt. Gleiches gilt für die zwei Antriebsfedern F, die außen neben den Pendelfedern angeordnet und im Pendel eingespannt sind. Somit sind die Längen von der Ankerachse zu den jeweiligen Einspannstellen unterschiedlich. Die Einspannstücke E1 (Pendel) und E2 (Antriebsfeder) bewegen sich auf Kreisbahnen um D. Der Anker überträgt seine Bewegung über einen Rahmen R auf eine Stahlspitze SP, die in einen auf dem Einspannstück E1 befestigten Lochstein LS spielfrei eingreift (in der Prinzipdarstellung der Punkt B). Diese Lösung wurde gewählt, um kleine Unterschiede der Kreisbahn des Ankers und der (genäherten) Kreisbahn des Einspannstückes der Antriebsfeder durch eine Taumelbewegung bzw. Vertikalbewegung der Spitze im Stein ohne größere Auswirkung auf die Federbiegung ausgleichen zu können. In späteren Ausführungen wurde stattdessen ein Kugeleingriff verwendet. Der Rahmen diente der Justage. Sowohl die Befestigung des Rahmens am Ankerausleger als auch die Stahlspitze waren feinfühlig verschiebbar. So konnte der Antriebsimpuls exakt symmetriert werden. Die in der historischen Darstellung der Hemmung sichtbare Schlitzschraube diente nur der Transportsicherung. Die Blattfedern hatten eine Dicke von ca. 0,1 mm.
Für eine möglichst freie Pendelschwingung musste die Auslösearbeit des Pendels (Störfaktor) minimiert werden. Die Ruheflächen der Paletten waren deshalb nur ca. 0,2 mm breit (eine Ursache für die Erschütterungsempfindlichkeit der Hemmung). Solche Paletten aus einem Stück herzustellen, war praktisch unmöglich, da die Kimme zwischen Hebe- und Ruhrfläche scharfkantig sein musste. Aus diesem Grund wurden jeweils zwei Paletten hintereinander angeordnet, wodurch sich die Scharfkantigkeit von selbst ergab. Außerdem bestand dadurch die Möglichkeit, durch Verschiebung der Paletten gegeneinander die Breite der Ruhefläche optimal zu justieren (siehe Bild).
Die von Strasser&Rohde in Glashütte (Sachsen) gefertigten Uhren (z. T. mit Kompensationspendeln von Riefler) sollen mittlere Gangabweichungen von 0,02 Sekunden pro Tag erreicht haben.[58]
Die freie Federhemmung gewährleistet, im Gegensatz zu einer weitverbreiteten Annahme, keine konstante Schwingungsweite des Schwingers bei sich veränderndem Drehmoment des Laufwerkes. Dem Schwinger müsste dazu eine konstante Leistung zugeführt werden, d. h., die Hebung müsste immer in der exakt gleiche Zeit erfolgen. Das ist aber bei variierendem Laufwerkdrehmoment nicht der Fall.
(siehe zu dieser Hemmung auch: Zwischenaufzug)
Freie Schwerkrafthemmung von Riefler

Freie Schwerkrafthemmung von Riefler (Prinzip)

Freie Schwerkrafthemmung von Riefler (Schneidenlagerung auf ebenen Achatplatten)

Freie Schwerkrafthemmung von Riefler (Doppelrad)

Freie Schwerkrafthemmung von Riefler (Funktion)

Die Hemmung wurde 1913 für die Firma Clemens Riefler patentiert. Sigmund Riefler war ein Jahr zuvor gestorben. Er wird in der Patentschrift nicht genannt, soll aber die Anmeldung der Erfindung bereits 1908 getätigt haben.
Es handelt sich um eine freie Hemmung für Pendeluhren. Die Hemmung gewährleistet eine weitestgehend störfreie Schwingung des Schwingers.
Der Aufbau der Hemmung ist aus der nebenstehenden Prinzipdarstellung ersichtlich.[59] Ein Pendel P schwingt um die Drehachse D. Die Drehachse wird durch ein Schneidenlager, bestehend aus zwei am Gestell G befestigten Prismen PR und den Schneiden SN gebildet (wie bei der Federkrafthemmung von Riefler). In späteren Ausführungen sind die Schneiden auf ebenen Achatplatten gelagert und durch zwei in der Drehachse befindliche Körnerlager lagegesichert (siehe Bild). Ein Körnerlager besteht aus einem (einstellbaren) Stift mit Kegelspitze, der in eine Kegelpfanne mit größerem Kegelwinkel eingreift. Die beiden Körnerlager haben praktisch keinen Einfluss auf die freie Pendelschwingung, da das gesamte Pendelgewicht auf den Schneiden lagert und somit die Störungen durch die Körnerlager verschwindend gering sind. Die Körnerlager können mit ihrer Achse auch rechtwinklig zur Pendeldrehachse angeordnet sein, wenn die Kegelspitzen auf der Drehachse liegen und der Öffnungswinkel der Kegelpfanne so groß ist, dass die Pendelschwingung nicht behindert wird.
Zwei unabhängig voneinander bewegliche Hebelarme HA besitzen ebenfalls eine Drehachse, die mit D zusammenfällt. Die Hebel fallen durch ihr Gewicht auf das doppelte Hemmungsrad, das aus dem Ruherad RR und dem Hebungsrad HR besteht, die beide auf einer gemeinsamen Welle befestigt sind und vom Laufwerk angetrieben werden. Aus der Anordnung der Verzahnung der Hemmungsräder zueinander ergibt sich eine resultierende Kontur RK (siehe Bild), die für die Zusammenwirkung mit den Hemmelementen maßgeblich ist. Von der Verzahnung beider Räder werden nur Teilbereiche wirksam, nämlich die schiefen Ebenen HF (Hebeflächen) und die Anschläge RF (Ruheflächen). Jeder Hebelarm ist mit einem in beide Räder eingreifenden Hemmelement H (Palette) versehen, das im Bereich des Hebungsrades zylindrisch ist, während es im Bereich des Ruherades halbrund ausgeführt ist. Mit einem in der Schneidenhalterung SH fest eingesetzten, jedoch bei Bedarf um die Achse C zu Justagezwecken drehbaren Zwischenstück Z ist ein balkenförmiger Auslösestift AS verbunden, der bis zu den beiden Hebelarmen reicht. Das Pendel ist in das Zwischenstück eingehängt. Jeder Hebelarm ist mit einem durch Verschiebung in seiner Längsachse einstellbaren Betätigungsstift BS versehen, an den sich der Auslösestift anlegen und bei einer Pendelbewegung die Hebelarme vom Doppelhemmungsrad abheben kann. Mit dem Justierarm JA kann über eine Justierschraube JS das Zwischenstück und damit der Auslösestift um die Achse C feinfühlig verstellt werden. Die genannten Justiermöglichkeiten dienen der Symmetrierung des Antriebsimpulses und der Einstellung des Eingriffs der Hemmelemente in die Hemmungsräder.
Der beschriebene Aufbau kann konstruktiv vielfach variiert werden (z. B. Schneidenlager mit ebener Gegenfläche, Auslösestift oberhalb der Drehachse D, Verwendung nur eines Hemmungsrades usw.). Die nachfolgend beschriebene Funktion ist jedoch grundlegend.
In Phase 1 (siehe Bild) schwingt das Pendel im Uhrzeigersinn und befindet sich nahe seiner Mittellage. Das eingangsseitige Hemmelement hat, angehoben vom Auslösestift, die Ruhefläche des Hemmungsrades verlassen. Das ausgangsseitige Hemmelement hat, bis es zur Anlage an die Hebefläche gekommen ist, das Pendel in Uhrzeigerrichtung beschleunigt. Nun dreht sich das Hemmungsrad und hebt über die Hebefläche den ausgangsseitigen Hebelarm an, bis das Hemmelement die Ruhefläche erreicht hat (Phase 2). Dem Hebelarm wird also potentielle Energie zugeführt. Dieser Vorgang hat keinerlei Einfluss auf das Pendel (Betätigungsstift liegt nicht am Auslösestift an). Er muss auch nicht immer in exakt gleicher Zeit erfolgen. Schwankungen des Drehmomentes des Laufwerkes verändern somit den Wert der zugeführten Energie nicht. Das Pendel schwingt bis zu seinem Umkehrpunkt und hebt beim Rückschwung das ausgangsseitige Hemmelement von der Ruhefläche ab. Die dabei zu erbringende Auslösearbeit sollte sehr niedrig sein (Störung der freien Schwingung). Deshalb sind die Ruheflächen sehr klein. Das eingangsseitige Hemmelement hat nun wieder die Höhe erreicht, auf die es bei der vorherigen Drehung des Hemmungsrades von der Hebefläche angehoben wurde. Das Gewicht des eingangsseitigen Hebels beschleunigt nun das Pendel (Betätigungsstift liegt am Auslösestift an), bis das Hemmelement den Anfang der Hebefläche erreicht hat (Phase 4). Dabei wird die potentielle Energie, die bei der Drehung des Hemmungsrades zugeführt wurde, an das Pendel abgegeben. Diese hat immer exakt den gleichen Wert, da sie nur von der Hebungshöhe und der unveränderlichen Erdanziehung abhängig ist. Das Pendel schwingt nun wieder bis zum Umkehrpunkt (Phase 5), es erfolgt die Hebung (Phase 6) und in Phase 7 wieder die Auslösung durch das zurückschwingende Pendel. Zwischen Phase 7 und Phase 8 erteilt nunmehr der ausgangsseitige Hebel dem Pendel den Antriebsimpuls, womit die Ausgangssituation von Phase 1 wieder erreicht ist. Die Schwingungsweite des Pendels ist in der Realität sehr viel kleiner als hier zur Verdeutlichung dargestellt (ca. 3°).
Die Hemmung war genaueste mechanische Hemmung, die je entworfen wurde, sie wurde daher für astronomische Präzisionsuhren eingesetzt. Mit diesen Uhren sollen mittlere Gangabweichungen von unter 0,01 s pro Tag erreicht worden sein. Ab 1940 wurden die Pendeluhren der Firma Riefler nur noch mit Schwerkrafthemmung gefertigt.[60] In den 1960er Jahren wurde die Produktion eingestellt.
Im Gegensatz zu den freien Federhemmungen von Riefler und Strasser gewährleistet die Schwerkrafthemmung eine konstante Schwingungsweite des Schwingers auch bei sich veränderndem Drehmoment des Laufwerkes. Sie kann deshalb als Konstantimpuls-Hemmung angesehen werden.
(siehe zu dieser Hemmung auch: Zwischenaufzug)
Sirenenhemmung

Sirenenhemmung

Die Sirenenhemmung ist eine Hemmung für einen historischen elektromechanischen Kurzzeitmesser (Chronoskop). Die Hemmung und das Chronoskop wurden von Matthäus Hipp 1848 erfunden und von ihm und anderen in den Folgejahren weiterentwickelt[61].
Das Hippsche Chronoskop ermöglichte erstmals Messungen mit einer Auflösung von Tausendstelsekunden.
Diese Hemmung unterscheidet sich prinzipiell von den anderen hier beschriebenen Hemmungen. Durch die Sirenenhemmung wird das Laufwerk des Kurzzeitmessers nicht im Zeittakt des Gangreglers gestoppt und wieder freigegeben, sondern der Ablauf des Räderwerks wird mit hoher Frequenz periodisch (wenig) abgebremst und wieder beschleunigt. Dabei fungiert eine Blattfeder als Gangregler.
Die Blattfeder besitzt eine Eigenfrequenz von 1000 Schwingungen pro Sekunde (1 kHz). Sie drückt auf die Zähne eines Sägzahnrades, das als Hemmungsrad dient. Das gesamte Räderwerk wird von einem Gewichtsantrieb angetrieben.
Der Andruck der Feder wird mit einem verschiebbaren Justiergewicht so justiert, dass die von einem Sägezahn angehobene Feder (Abbremsung des Rades) auf Grund ihrer Rückstellkraft in die nächste Lücke des sich weiterbewegenden Rades fällt. Dabei wird das Rad kurzzeitig freigegeben und wieder beschleunigt. Beim erneuten Auftreffen der Feder erfolgt wieder die Abbremsung. Es stellt sich eine konstante mittlere Drehzahl ein. Die wirksame Federlänge kann mit einem Justierschieber beeinflusst werden.
Wegen der Eigenfrequenz der Feder trifft die Feder nur dann in immer gleicher Weise auf das Rad, wenn sich dieses in einer Tausendstelsekunde um einen Zahn weiterbewegt und die Federschwingung periodisch anregt. Die sich bewegende Feder versetzt die Luft in Schwingung, so dass ein Pfeifton zu hören ist. Die richtige Federeinstellung (Kalibrierung) wird gefunden, indem dieser Pfeifton mit dem einer 1000 Hz-Stimmgabel akustisch abgeglichen wird. Dies kann durch geschultes Personal (z. B. Klavierstimmer) hochgenau geschehen. Die Stimmgabelfrequenz (Frequenznormal) konnte mit zu damaliger Zeit bereits bekannten Methoden exakt bestimmt werden.
Vor der Kurzzeitmessung muss abgewartet werden, bis das kalibrierte Chronoskop sein konstante Drehzahl (konstanter Pfeifton) erreicht hat. Bis dahin schwillt der abgegebene Ton wie bei einer Sirene an. Daher die Bezeichnung Sirenenhemmung.
Ein Zeigerwerk kann zum Zwecke der Messung elektromagnetisch dem Räderwerk zu- und von ihm weggeschaltet werden. Je nach Zähnezahl des Hemmungsrades wird dessen hohe Drehzahl durch das Zeigerwerk so auf zwei Räder untersetzt, dass diese sich zum einen zehnmal pro Sekunde und zum anderen einmal in zehn Sekunden drehen. Die Räder sind mit Zeigern und zugehörigen Zifferblättern versehen, die jeweils 100 Teilstriche aufweisen. Somit entspricht ein Teilstrich bei dem einen Zifferblatt der Anzeige von einer Tausendstelsekunde und bei dem anderen einer Zehntelsekunde.
Das Chronoskop wurde eingesetzt für die Messung der Abweichung von Präzisionspendeluhren von der Sternzeit, in der Psychologie für die Messung von menschlichen Reaktionszeiten (Persönliche Gleichung), Hochgeschwindigkeitsmessungen (Ballistik, Geschoßgeschwindigkeiten), Fallversuche und andere.
Moderne Entwicklungen
Mit der massenhaften Produktion von Quarzuhren bestand keine Notwendigkeit mehr, mechanische Hemmungen zu verbessern bzw. neu zu entwickeln, um so eine genauere Zeitanzeige zu realisieren. Hochwertige mechanische Armbanduhren erfreuen sich jedoch steigender Beliebtheit und werden in wieder zunehmenden Stückzahlen hergestellt. Bei Armbanduhren mit manuellem Aufzug spielt jedoch neben der Ganggenauigkeit auch die Gangreserve eine Rolle. Es kommen neben der klassischen Schweizer Ankerhemmung auch Neuentwicklungen zur Anwendung, die auf anderen Prinzipien sowie modernen Materialien und Fertigungstechniken basieren. Auch für Pendeluhren gibt es entsprechende Bestrebungen. Sicherlich werden diese Hemmungen keine breite Anwendung finden bzw. größere Bedeutung für die Zeitmesstechnik erlangen. Sie sind aber aus technischer Sicht sehr interessant. Nachfolgend werden einige in die Praxis umgesetzte Konzepte aufgeführt.
Koaxialhemmung

Koaxialhemmung (Prinzip)

Koaxialhemmung (Funktion)

Koaxialhemmung (Co-axial escapement) animiert

(siehe auch Co-Axial-Hemmung)
Die Koaxialhemmung ist eine für Kleinuhren (Armbanduhren) mit Unruh-Spirale-Schwingsystem konzipierte Hemmung. Sie wurde in den 1970er Jahren von George Daniels entwickelt und 1980 patentiert.[62]
Bei dieser Hemmung ist dem Anker ein seitlicher Arm angefügt, der an seinem Ende, wo der Hebelstein an der Unruhwelle eingreift, im Wesentlichen wie der Anker der Schweizer Ankerhemmung gestaltet ist.[63]
Das Treiben wird nicht von den Hemmpaletten ausgeführt. Dafür sind zwei weitere Paletten vorhanden. Eine der beiden Triebpaletten befindet sich am Anker (zwischen den Hemmpaletten), der andere an der Unruhwelle (über dem Schlitz in der Sicherheitsrolle). Das Hemmungsrad besteht aus zwei verschieden großen, koaxial angeordneten Zahnrädern. Das Auslösen (Lösen der Hemmpalette vom Zahn) und das Treiben geschieht nahe der Mittellage der Unruh, das heißt, wenn diese die größte kinetische Energie hat. Der Antriebsimpuls wird beim Treiben wechselweise vom kleinen und großen Hemmungsrad auf die jeweilige Triebpalette übertragen. Eine Hebung (Bewegung auf schiefer Ebene) findet dabei nicht statt.
Die Hemmung wird seit 1999 von der Firma Omega in Serie gefertigt, wo sie die Schweizer Ankerhemmung abgelöst hat und für alle tragbaren mechanischen Uhren eingesetzt wird.
Das Prinzip der Hemmung ist aus nebenstehenden Bildern ersichtlich (Unruh und Anker-Sicherheitsmesser nicht dargestellt). Die beiden fest miteinander verbundenen (und sich somit synchron bewegenden) Hemmungsräder (Koaxialrad KR) werden vom Laufwerk angetrieben. Die Triebpalette TPA des Ankers greift in das kleine Hemmungsrad ein, während die tiefer angeordnete, an der Doppelscheibe DS der Unruh befestigte Triebpalette TPU auf das große Rad einwirkt. Die Doppelscheibe ist fest mit der Unruhwelle UW verbunden. Beide Hemmpaletten (Anschläge) HP arbeiten mit dem großen Rad zusammen. Der um die Achse DA bewegliche Anker A wird in seiner Bewegung von Begrenzungsstiften BS begrenzt. In die Gabel des Ankers greift der auf der Doppelscheibe befestigte Hebelstein HS ein. In Phase 1 schwingt die Unruh in Uhrzeigerrichtung und der Hebelstein bewegt den Anker, der sich vom Begrenzungsstift löst. Die ausgangsseitige Hemmpalette verlässt den Zahn des Hemmungsrades, wobei von der Unruh die Auslösearbeit aufzubringen ist. Die Unruhtriebpalette kann sich am Hemmungsradzahn vorbeibewegen (sehr kleiner Abstand). Das Hemmungsrad dreht sich nun und ein Zahn des kleinen Rades trifft auf die Triebpalette des Ankers, so dass dieser bewegt wird und über die Gabel dem Hebelstein und damit der Unruh einen Antriebsimpuls verleiht (Phase 2). Die Relativbewegung s zwischen Zahn und Triebpalette ist dabei sehr gering (ähnlich wie bei der Chronometerhemmung), da dieser Vorgang in der Nähe des Berührungspunktes beider Kreisbahnen abläuft (Eingriffsbereich e).
Das ist ein Vorteil gegenüber der Schweizer Ankerhemmung, bei der sich der Zahn auf der (meist geölten) Hebefläche (schiefe Ebene) bewegt. Die sich dabei im Lauf der Zeit verändernden Reibungsverhältnisse haben Veränderungen des Antriebsimpulses und damit Gangabweichungen zur Folge.
In Phase 3 schwingt die Unruh bis zum Umkehrpunkt, der Anker hat sich an den Begrenzungsstift angelegt und das Hemmungsrad hat sich bis zur Anlage eines Zahnes des großen Hemmungsrades an die eingangsseitige Hemmpalette bewegt. Der Zahn des kleinen Hemmungsrades hat die Impulspalette des Ankers verlassen. Die Unruh schwingt nun entgegen der Uhrzeigerrichtung zurück und verrichtet die Auslösearbeit an der eingangsseitigen Hemmpalette (Phase 4). Der Triebpalette der Unruh wird nun vom Zahn des sich bewegenden großen Hemmungsrades ein Antriebsimpuls verliehen (Phase 5). Die Unruh schwingt zu ihrem Umkehrpunkt und ein Zahn des Hemmungsrades legt sich an die ausgangsseitige Hemmpalette an. Beim Rückschwung ist wieder Phase 1 erreicht.
Konstantimpuls-Hemmung

Konstantimpuls-Hemmung
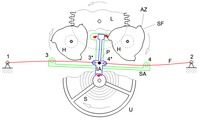
Konstantimpuls-Hemmung IA Impulsanker SA Spannanker L Laufwerk H Hemmungsrad AZ Anschlagzahn SF Steigfläche F Siliziumfeder U Unruh S Spirale P Drehachse beider Anker

Die Konstantimpuls-Hemmung (engl.: constant force escapement) ist konzipiert für Kleinuhren mit Zugfederantrieb und Unruh-Spirale-Schwingsystem. Sie wurde bei der Firma Girard-Perregaux von Nicolas Déhon entwickelt (Patentanmeldung 2008; EP 2105806). Die Hemmung gewährleistet, dass dem Schwingsystem Antriebsimpulse konstanter Größe zugeführt werden, was zu konstanter Schwingungsweite der Unruh und damit zu hoher Ganggenauigkeit führt. Der Entspannungszustand der Zugfeder hat keinen (negativen) Einfluss auf die Antriebsimpulse.
Die Hemmung besteht aus zwei von einem gemeinsamen Laufrad angetriebenen Hemmungsrädern. Sie können sich somit nur gleichsinnig und synchron bewegen. Die Hemmungsräder sind als Kurvenscheiben mit Anschlagzähnen ausgeführt. Ein Anker trägt zwei Ankersteine, die abwechselnd mit einem der beiden Hemmungsräder in Eingriff sind und besitzt die übliche Ankergabel mit Sicherheitsmesser. Der Anker ist über zwei symmetrische Auslegerarme mit einer extrem dünnen Stabfeder verbunden, die aus Silizium besteht. Die Stabfeder ist so eingespannt, dass sie zwei S-förmige stabile (spiegelbildliche) Zustände aufweist. Sie kann durch ein vom Anker über die Auslegerarme zugeführtes Biegemoment von einem in den anderen Zustand überführt werden („durchschlagen“). Dabei wird der Feder bis zum Durchschlagpunkt Energie zugeführt, die beim Durchschlagen wieder frei wird. Die frei werdende Energie ist von den Eigenschaften der Feder abhängig und von konstanter Größe.
Beim Einschwingen des Hebelsteins der Unruh in die Ankergabel wird der Ablauf des Laufwerks durch Anliegen eines Ankersteins an einem Anschlagzahn eines Hemmungsrades gesperrt. Die Siliziumfeder ist durch den Anker bis kurz vor den Durchschlagpunkt gespannt. Die Unruh muss nun die (sehr kleine) Auslösearbeit leisten, indem der Hebelstein den Anker leicht verschwenkt, wodurch einerseits der Ankerstein vom Anschlagzahn des Hemmungsrades gelöst und andererseits die Siliziumfeder zum Durchschlagen gebracht wird. Durch die dabei an den Anker abgegebene Energie der Siliziumfeder wird der Anker beschleunigt und gibt über die Gabel einen Antriebsimpuls an den Hebelstein der Unruh. Während dieses Vorgangs ist das Laufwerk entsperrt und kann sich bewegen, bis ein Anschlagzahn des nunmehr anderen Hemmungsrades mit dem entsprechenden Ankerstein des Ankers in Eingriff kommt. Bei dieser Bewegung wird die Siliziumfeder über eine Kurve des Hemmungsrades nun in gegenteiliger Richtung bis kurz vor den Durchschlagpunkt gespannt und der beschriebene Vorgang wiederholt sich.
Solange das vom Laufwerk an die Hemmungsräder abgegebene Drehmoment ausreicht, die Siliziumfeder zu spannen, bleibt der Antriebsimpuls konstant, so dass selbst bei weit entspannter Zugfeder die optimale Schwingungsweite der Unruh aufrechterhalten wird.
Für die Minimierung der Auslösearbeit der Unruh ist es zweckmäßig, den Anker in einen Impulsanker und einen Spannanker zu unterteilen.
(siehe zu dieser Hemmung auch: Zwischenaufzug)
Genequand-Hemmung
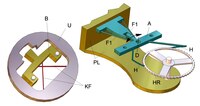
Genequandhemmung (Bauteile)
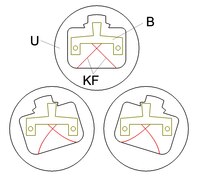
Genequandhemmung
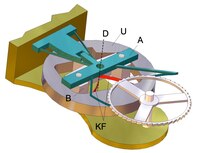
Genequandhemmung (Aufbau)

Genequandhemmung (Funktion)

Genequandhemmung (Kompensator)
Diese Hemmung wurde für Armbanduhren entworfen. Sie stellt eine miniaturisierte Variante der Grashüpferhemmung unter Verwendung von Materialien (Silizium) und Fertigungsverfahren (Lithografie, Ätzen, Lasern etc.) der Mikromechanik dar. Die Gelenke (Scharniere) und drehenden Elemente wurden durch Festkörpergelenke (Federgelenke) ersetzt. Statt Pendel bzw. Waag kommt eine modifizierte Unruh zur Anwendung. Zwar wurde das Patent bereits 2005 angemeldet,[64] aber Uhren mit dieser Hemmung sind bisher (2016) nicht über das Prototypenstadium hinausgekommen (Vaucher Manufacture Fleurier[65][66]).
Die Hemmung wurde vom Schweizer Physiker Pierre Genequand entwickelt. Sie hat geringe Reibungsverluste und besitzt deshalb eine Gangreserve von mehr als 30 Tagen. Der Oszillator (modifizierte Unruh) arbeitet mit einer Schwingungsweite von nur ca. 5° (bei der Schweizer Ankerhemmung sind es ca. 220°) und einer Frequenz von 16 Hz (Schw. A. max 4 Hz). Aufgrund der verwendeten Siliziumteile ist diese Hemmung nicht magnetisch und kommt ohne Schmierung aus. Die Hemmung besteht aus einem Teil A, das an der Platine PL befestigt und aus einem Stück gefertigt ist (siehe Bild). Es besitzt die beiden in das Hemmungsrad HR eingreifenden Grashüpfer-Hemmelemente H und die beiden Federn F1. Letztere ermöglichen eine geringfügige Drehung (näherungsweise) um die Achse D[67] (vgl. dort Fig. 39). Ein Teil B ist mit der Unruh U über ein sogenanntes Kreuzfedergelenk verbunden. Dieses Gelenk hat die Eigenschaft, dass sich bei festgehaltenem Teil B die Unruh (näherungsweise) um die Kreuzungsachse der Federn drehen kann, wobei die Federn eine rücktreibende Kraft (analog zur Unruhspiralfeder bei anderen Hemmungen) ausüben.[68] Zweckmäßigerweise liegt der Kreuzungspunkt auf der Mittelachse der Unruh. Das Teil B kann fest auf dem Teil A montiert werden. Die Drehachse der Unruh fällt dann mit der Achse D zusammen (vgl. Bild).
Die Funktion der Hemmung ist die gleiche wie bei der Grashüpferhemmung (siehe dort). Im Bild ist gezeigt, wie die Unruh, bis dahin vom eingangsseitigen Hemmelement über das Teil A und das Kreuzfedergelenk angetrieben, in Uhrzeigerrichtung schwingt. Das ausgangsseitige Hemmelement ist mit dem von Laufwerk in Uhrzeigerrichtung angetriebenen Hemmungsrad in Eingriff gekommen und die Unruh übt über das Kreuzfedergelenk zusammen mit den Federn F1 eine Kraft auf das Hemmungsrad aus, die dieses ein Stück zurücktreibt. Dadurch kann das eingangsseitige Hemmelement durch seine Federwirkung den Zahn des Hemmungsrades verlassen und gelangt außer Eingriff. Das Hemmungsrad bewegt sich nun weiter in Uhrzeigerrichtung und das ausgangsseitige Hemmelement übt über A und das Kreuzfederelement ein die Unruh abbremsendes Drehmoment auf die Unruh aus, das in der Folge Teil A um D verdreht und das eingangsseitige Hemmelement mit einem folgenden Zahn wieder in Eingriff bringt.
Die mit dem Kreuzfedergelenk ausgestattete Unruh hat die Eigenschaft, dass ihre Schwingungsdauer stark von der Schwingungsweite abhängt. Drehmomentschwankungen des Laufwerks führen somit zu Gangabweichungen. Deshalb ist ein sogenannter Isochronismuskompensator vorgesehen. Über einen hier nicht interessierenden Mechanismus wird die Federlänge L zweier Federn F2, die über Stifte ST auf Teil A einwirken, mit einem Schieber S in Abhängigkeit vom Laufwerkdrehmoment verändert. Dem vom Hemmungsrad auf die Hemmelemente und damit Teil A übertragenen veränderliche Drehmoment steht somit immer ein von F1 und F2 erzeugtes (variables) Gegenmoment gegenüber, das die Schwankungen kompensiert und die gleichmäßige Schwingungsweite der Unruh garantiert. Im Bild ist das schematisch gezeigt. Die Teile S, C und F3 (Federn) sind wiederum aus einem Stück gefertigt. S wird in C geführt und von F3 gehalten. C ist auf der Platine befestigt.[69]
Haldimannhemmung

Haldimannhemmung

Haldimannhemmung (Detail)
Es handelt sich um eine Hemmung für Pendeluhren. In der Patentschrift von 1999 wird Bezug auf die Strasserhemmung genommen,[70] jedoch kann auch die Federkrafthemmung von Riefler zum Vergleich herangezogen werden. Beide arbeiten mit Antriebsfedern für das Pendel (vgl. Beschreibungen der Riefler- und der Strasserfederkrafthemmung).
Die traditionelle Uhrmacherei ging bei Blattfedern für die Pendelaufhängung bzw. Antriebsfedern von einem sogenannten Biegepunkt (Biegeachse) aus, dessen Lage bei ca. einem Drittel der Federlänge unverändert liegen sollte. Real verändert dieser Punkt beim Pendelausschlag (also bei Biegung der Federn) seine Lage jedoch, wenn auch nur minimal. Pendel und Antriebsfeder bewegen sich bei Strasser (Pendel an Feder aufgehängt) somit um verschiedene, sich während der Pendelschwingung gegeneinander verschiebende Drehpunkte, die ihre Lage auch noch relativ zum festen Ankerdrehpunkt verändern. Bei Riefler ist das Pendel bzw. der Anker in einem Schneidenlager gehaltert, so dass sich der Drehpunkt der Antriebsfeder gegenüber der festen Pendel- bzw. Ankerachse verlagert. Das beschriebene Problem ist bei Riefler vernachlässigbar, da es bei jeder Pendelschwingung in sich identisch wiederholender Form auftritt. Strasser dagegen war bei seiner Hemmung zu einer zwar funktionierenden, aber wenig eleganten Lösung für die Kraftübertragung vom Anker auf die Antriebsfeder gezwungen (Stahlspitze in Lochstein, später Kugeleingriff). An diesem Punkt setzt die Haldimannhemmung an.
Die Kraftübertragung vom Anker auf die Antriebsfedern wird hier durch abstoßende Permanentmagnete realisiert. Diese vermeintlich einfache Lösung dürfte bei der Umsetzung einige Tücken bereithalten, da die Justage von Magnetsystemen nicht trivial ist.
Die Funktion der Hemmung ist aus dem nebenstehenden Bild ersichtlich. Wie bei der Grahamhemmung greifen zwei am Anker A befestigte Hemmelemente H (Paletten), die Anschlagsflächen RF (Ruheflächen) und schiefe Ebenen HF (Hebeflächen) aufweisen, in ein vom Laufwerk angetriebenes Hemmungsrad HR wechselweise ein. Das Pendel P ist über zwei Pendelfedern PF am Gestell G aufgehängt. Ebenfalls am Pendel sind die zwei Antriebsfedern AF eingespannt, die an ihrem anderen Ende einen Magnetträger MT halten (analog zur Strasserhemmung; siehe dort). Pendel, Magnetträger (beide näherungsweise) und Anker drehen sich um die Achse D. In die Ankergabel AG und den Magnetträger sind auf Abstoßung gepolte Permanentmagnete AM1, AM2 und PM eingelassen. Ankerwelle AW und Hemmungsradwelle HRW sind, wie auch zwei Justierschrauben JS, im Gestell gelagert.
Das Pendel schwingt entgegen der Uhrzeigerrichtung. Die beiden Antriebsfedern sind entspannt (also nicht verbogen). Der Anker liegt an einer Justierschraube an. Der Pendelmagnet PM nähert sich dem Ankermagneten AM1. Je näher sich beide Magnete kommen, desto größer wird ihre abstoßende Kraft (nichtlinear). Dadurch wird der Anker verdreht (die Antriebsfedern biegen sich dabei kurzzeitig etwas unter Einwirkung der abstoßenden Kraft). Das Hemmungsrad wird von der Ausgangspalette freigegeben und verdreht sich. Dabei muss das Pendel wegen der Reibungskraft des Hemmungsradzahnes auf der Palette die sogenannte Auslösearbeit verrichten. Diese stellt eine Störung der freien Pendelschwingung dar und sollte möglichst klein sein (geringe Eingriffstiefe der Palette in das Hemmungsrad). Ein Zahn des Hemmungsrades gelangt auf die schiefe Ebene der Palette und beschleunigt so den Anker, bis dieser an der anderen Justierschraube anschlägt. Ein Zahn des Hemmungsrades kommt an der Eingangspalette zur Anlage, so dass dessen Drehung gestoppt wird. Das Hemmungsrad hat sich um einen Zahn verdreht. Bei dieser schnell ablaufenden Bewegung (das Pendel bewegt sich nur geringfügig weiter) hat sich der Ankermagnet AM2 dem Pendelmagnet genähert und spannt nun mittels der abstoßenden Kraft die Antriebsfedern, die dem Pendel so einen Antriebsimpuls in dessen Bewegungsrichtung erteilen. Ursächlich für diesen Impuls ist die Drehung des Hemmungsrades, denn es hat ja über die Palettenhebung den Anker beschleunigt und so die Magnete einander angenähert. Das Pendel schwingt bis zu seinem Umkehrpunkt, wobei es durch die Annäherung des Pendelmagneten an den Ankermagneten AM1 abgebremst wird (Spannung der Antriebsfedern in Gegenrichtung). Nachdem das Pendel wieder in die Nähe seiner Mittellage gekommen ist (Antriebsfedern entspannt), sind sich Pendelmagnet und Ankermagnet AM2 so nahe, dass nun die Auslösung an der Eingangspalette und darauf der Antriebsimpuls in Uhrzeigerrichtung erfolgt.
Ob Uhren mit dieser Hemmung gebaut und welche Gangergebnisse ggf. erzielt wurden, ist nicht bekannt.
Siehe auch
- Gangregler für stetigen Ablauf (Bremsregler): Einfache mechanische Zeitglieder arbeiten oft nicht mit Hemmungen (Hemmregler), sondern verwenden Reibungsbremsen (zum Beispiel Fliehkraftbremsregler in Grammophonen, Telefon-Wählscheiben) oder aerodynamische Bremsen (zum Beispiel Windfang im Schlagwerk einer Uhr oder in einer Spieldose).[71]
- Isochronismus
- Technik in der Renaissance
- In einem mechanischen Metronom wird eine rückfallende Hemmung als Teil der Geschwindigkeitsregelung verwendet.
Literatur
- Urban Jürgensen: Allgemeine Grundsätze der genauen Zeitmessung durch Uhren oder Zusammenfassung der Grundsätze des Uhrenbaues zur sorgfältigsten Zeitmessung. – Leipzig, Verlag von Ludwig Schumann, 1840.
- Bassermann-Jordan, Bertele: Uhren. Verlag Klinkhardt & Biermann, Braunschweig 1969.
- G. O. Weiland, Ballwey (Hrsg.): Bruckmann’s Uhrenlexikon. Verlag Bruckmann, München 1980, ISBN 3-7654-1825-0.
- Rudi Koch (Hrsg.): BI-Lexikon – Uhren und Zeitmessung. Verlag VEB Bibliographisches Institut, Leipzig 1989, ISBN 3-323-00100-1.
- Helmut Kahlert, Richard Mühe, Gisbert L. Brunner: Armbanduhren: 100 Jahre Entwicklungsgeschichte. Callwey, München 1983; 5. Auflage ebenda 1996, ISBN 3-7667-1241-1, S. 52 f., 58 f. und 505 f.
- Gerhard Claußen & Karl-Hermann Ströde: Das große Uhren-ABC, Bd.1. Verlag Ebner, 1999, ISBN 3-9803675-0-9.
- Klaus Menny: Die Uhr und ihre Mechanik. Verlag Schäfer, Hannover 2003, ISBN 3-87870-687-1
- Charles-Andre Reymondin, Georges Monnier, Didier Jeanneret, Umberto Peraratti: Theorie der Uhrmacherei. Herausgeber: FET (Federation des Ecoles Techniques) 2001, ISBN 2-940025-11-8 (deutsch), ISBN 2-940025-10-X (französisch), ISBN 2-940025-12-6 (englisch)
Einzelnachweise
- ↑ Fachausdrücke bei erstmaliger Nennung kursiv und in Klammern, meistens aus Klaus Menny: Die Funktion der Uhr, Callwey, 1994
- ↑ Klaus Menny: Die Funktion der Uhr. Callwey, München 1994, ISBN 3-7667-1095-8, S. 37ff.
- ↑ Klaus Menny: Die Funktion der Uhr. Callwey, München 1994, ISBN 3-7667-1095-8. S. 37–40.
- ↑ John Harrison: The principles of Mr. Harrison's timekeeper, with plates of the same. W. Richardson, 1. Januar 1767 (Google Books [abgerufen am 1. Juni 2016]).
- ↑ Jonathan Hird, Jonathan Betts, Derek Pratt: The Diamond Pallets of John Harrison's Fourth Longitude Timekeeper—H4. Annals of Science. Band 65, Nr. 2, 1. April 2008.
- ↑ H.Jendritzki: Schriften der Freunde alter Uhren. Bd XVII. Deutsche Gesellschaft für Chronometrie, Nürnberg 1985.
- ↑ Krug u. a.: BI-Lexikon Uhren und Zeitmessung. Hrsg.: Rudi Koch. Bibliographisches Institut, Leipzig 1989, ISBN 978-3-323-00100-8.
- ↑ 300th Anniversary of the Longitude Act. Archiviert vom Original am 11. Juni 2016; abgerufen am 11. Juni 2016.
- ↑ Museumslandschaft Hessen Kassel. In: www.museum-kassel.de. Archiviert vom Original am 27. Mai 2016; abgerufen am 27. Mai 2016.
- ↑ Ken Kuo: Cross-Beat Escapement (or Double Balance Escapement). 25. Dezember 2013, abgerufen am 2. September 2016.
- ↑ Richard Mühe: Die Historische Uhrensammlung Furtwangen. Furtwangen 1967.
- ↑ Volker Vyskocil: Schwarzwälder Hakenhemmung. UhrenTechnik, abgerufen am 30. August 2013 (animiert).
- ↑ Gooii Ltd. info@gooii.com: H1 – National Maritime Museum. Abgerufen am 14. Februar 2017.
- ↑ Marlene Halliday: Harrison Clock – H1. 14. Juli 2009, abgerufen am 16. Februar 2017.
- ↑ Valentin: Physics of Harrison’s H1 clock. In: The Sugar High. 13. Oktober 2012, abgerufen am 14. Februar 2017.
- ↑ Ruxu Du, Longhan Xie: The Mechanics of Mechanical Watches and Clocks. Springer Science & Business Media, 2012, ISBN 978-3-642-29308-5 (Google Books [abgerufen am 11. Juni 2016]).
- ↑ bshallard: Grasshopper Escapement. 3. Mai 2007, abgerufen am 11. Juni 2016.
- ↑ Volker Vyskocil: Graham-Hemmung. UhrenTechnik, abgerufen am 30. August 2013 (animiert).
- ↑ Fritz von Osterhausen: Callweys Uhrenlexikon. München 1999, ISBN 3-7667-1353-1, S. 125
- ↑ Theorie der Uhrmacherei. CADEV, Lausanne 2001, ISBN 2-940025-11-8, S. 312.
- ↑ Volker Vyskocil: Zylinderhemmung. UhrenTechnik, abgerufen am 30. August 2013 (animiert).
- ↑ Helmut Kahlert, Richard Mühe, Gisbert L. Brunner: Armbanduhren: 100 Jahre Entwicklungsgeschichte. Callwey, München 1983; 5. Auflage ebenda 1996, ISBN 3-7667-1241-1, S. 59 und 506.
- ↑ Fritz von Osterhausen: Callweys Uhrenlexikon. München 1999, ISBN 3-7667-1353-1, S. 369f
- ↑ Helmut Kahlert, Richard Mühe, Gisbert L. Brunner, Christian Pfeiffer-Belli: Armbanduhren: 100 Jahre Entwicklungsgeschichte. 1996, S. 506.
- ↑ Helmut Kahlert, Richard Mühe, Gisbert L. Brunner: Armbanduhren: 100 Jahre Entwicklungsgeschichte. Callwey, München 1983; 5. Auflage ebenda 1996, ISBN 3-7667-1241-1, S. 59 und 506.
- ↑ Volker Vyskocil: Duplexhemmung. UhrenTechnik, abgerufen am 30. August 2013 (animiert).
- ↑ G. A. Berner: Illustriertes Fachlexikon der Uhrmacherei, Stichwort Dutertre. Elektronische Version. Abgerufen am 17. Februar 2013.
- ↑ Klaus Menny: Die Funktion der Uhr. Callwey, 1994, S. 42–43.
- ↑ Krug u. a.: BI Lexikon Uhren und Zeitmessung. Hrsg.: Rudi Koch. Bibliographisches Institut, Leipzig 1989, ISBN 978-3-323-00100-8.
- ↑ Ruxu Du, Longhan Xie: The Mechanics of Mechanical Watches and Clocks. Springer Science & Business Media, 2012, ISBN 978-3-642-29307-8 (Google Books [abgerufen am 5. Juli 2016]).
- ↑ Moritz Großmann: Der freie Ankergang für Uhren. Abgerufen am 5. Juli 2016.
- ↑ Volker Vyskocil: Glashütter Ankergang. UhrenTechnik, abgerufen am 30. August 2013 (animiert).
- ↑ Lexikon – Uhrenhersteller und Uhrwerke aus Glashuette. In: www.glashuetteuhren.de. Abgerufen am 2. Juli 2016.
- ↑ A. Preslmayer: Vorlagen für das Fachzeichnen des Uhrmachers. Abgerufen am 2. Juni 2016.
- ↑ Volker Vyskocil: Schweizer Ankerhemmung. UhrenTechnik, abgerufen am 30. August 2013 (animiert).
- ↑ Helmut Kahlert, Richard Mühe, Gisbert L. Brunner, Christian Pfeiffer-Belli: Armbanduhren: 100 Jahre Entwicklungsgeschichte. Callwey, München 1983; 5. Auflage ebenda 1996, ISBN 3-7667-1241-1, S. 505.
- ↑ Zdenek Martinek, Jaroslav Rehor: Mechanische Uhren. VEB Verlag Technik Berlin, ISBN 3-341-00022-4.
- ↑ Sinn Uhren: DIAPAL. In: www.sinn.de. Abgerufen am 2. Juli 2016.
- ↑ Theorie der Uhrmacherei. CADEV, Lausanne 2001, ISBN 2-940025-11-8, S. 101–122.
- ↑ Volker Vyskocil: Stiftankergang. UhrenTechnik, abgerufen am 30. August 2013 (animiert).
- ↑ Helmut Kahlert u. a.: Armbanduhren. 100 Jahr Entwicklungsgeschichte. 1996, S. 505.
- ↑ Klaus Menny: Die Uhr und ihre Mechanik: für Sammler und Liebhaber. HolzWerken, 2003, ISBN 978-3-87870-687-8 (Google Books [abgerufen am 5. Juli 2016]).
- ↑ Zdenek Martinek; Jaroslav Rehor: Mechanische Uhren. VEB Verlag Technik Berlin, ISBN 3-341-00022-4.
- ↑ Helmut Kahlert u. a.: Armbanduhren. 100 Jahr Entwicklungsgeschichte. 1996, s. 506.
- ↑ Fritz von Osterhausen: Callweys Uhrenlexikon. München 1999, ISBN 3-7667-1353-1, S. 55
- ↑ Rudi Koch u. a.: BI-Lexikon Uhren und Zeitmessung. Hrsg.: Rudi Koch. VEB Bibliographisches Institut Leipzig, ISBN 3-323-00100-1.
- ↑ Volker Vyskocil: Chronometerhemmung mit Feder. UhrenTechnik, abgerufen am 30. August 2013 (animiert).
- ↑ Volker Vyskocil: Chronometerhemmung mit Wippe. UhrenTechnik, abgerufen am 30. August 2013 (animiert).
- ↑ Curt Dietzschold: Die Turmuhren, mit Einschluß der sogenannten Kunstuhren.; Bernhard Friedrich Voigt; Weimar 1894; S. 99 ff.
- ↑ The Gravity Escapement. In: www.bmumford.com. Abgerufen am 14. Juli 2016.
- ↑ Patent DE50739C: Doppelradhemmung für Chronometer mit vollkommen freier Unruhe für Pendeluhren mit freiem Pendel. Angemeldet am 18. Juli 1889, veröffentlicht am 12. Februar 1890, Erfinder: Siegmund Riefler.
- ↑ Dieter Riefler: Riefler-Präzisionsuhren: 1890–1965; Callwey Verlag; München 1991; ISBN 3-7667-1003-6.
- ↑ Patent CH850A: Echappement mit absolut freier Unruhe für Chronometer aller Art, inklusive Taschenuhren. Angemeldet am 7. Mai 1889, veröffentlicht am 31. Dezember 1889, Erfinder: Siegmund Riefler.
- ↑ Jürgen Ermert: Präzisionspendeluhren. Abgerufen am 16. Juni 2019.
- ↑ Sigmund Rieflers Präzisionspendeluhren - Deutsches Uhrenmuseum. In: www.deutsches-uhrenmuseum.de. Abgerufen am 19. Juni 2016.
- ↑ Wilhelm Schultz: L. Strasser’s freie Hemmung für Präzisions-Pendeluhren. In: Deutsche Uhrmacher-Zeitung (1900), Nr. 17, S. 19–21.
- ↑ Jendritzki: Von der Strasserhemmung. (PDF) Abgerufen am 11. Juni 2016.
- ↑ Strasser & Rohde von 1875–1917 – Uhrenhersteller und Uhrwerke aus Glashuette. In: www.glashuetteuhren.de. Abgerufen am 11. Juni 2016.
- ↑ Patent DE272119C: Schwerkrafthemmung mit zwei Antriebshebeln. Angemeldet am 3. Juni 1913, veröffentlicht am 24. März 1914, Anmelder: Firma Clemens Riefler.
- ↑ Das Genie Dr. phil. hc. Sigmund Riefler. (PDF) Abgerufen am 20. Juni 2016.
- ↑ Oelschläger: Hipp's Chronoskop, zur Messung der Fallzeit eines Körpers etc. In: Polytechnisches Journal. Band 114, 1849, S. 255–259 (hu-berlin.de [abgerufen am 23. November 2020]).
- ↑ Patent EP0018796B1: Uhren, Pendeluhren, Chronometer und Hemmungen dafür. Angemeldet am 25. April 1980, veröffentlicht am 7. November 1984, Erfinder: George Daniels.
- ↑ Volker Vyskocil: „Extra Flat Co-Axial“ Hemmung. UhrenTechnik, abgerufen am 30. August 2013 (animiert).
- ↑ Patent DE602005005465T2: Uhr. Angemeldet am 23. Juni 2005, veröffentlicht am 9. April 2009, Anmelder: Suisse Electronique Microtech, Erfinder: Pierre-Marcel Genequand.
- ↑ CSEMtechnologies: Innovation auf dem Uhrenmarkt: Diese Uhr wird nur einmal pro Monat aufgezogen. 15. September 2014, abgerufen am 20. Juli 2016.
- ↑ Reibungslose Revolution. 3. Juni 2016, abgerufen am 20. Juli 2016.
- ↑ Patent EP2794463B1: Verfahren zur Freisetzung eines mikromechanischen Bauteils mit zerbrechlichen Befestigungselementen. Angemeldet am 21. Dezember 2012, veröffentlicht am 15. März 2017, Anmelder: ESEM Centre Suisse D'Electronique et de Microtechnique SA, Erfinder: Francois Barrot et al (Fig. 39).
- ↑ Patent EP2911012B1: Oszillator einer Uhr. Angemeldet am 20. Februar 2014, veröffentlicht am 22. Juli 2020, Anmelder: CSEM Centre Suisse D'Electronique et de Microtechnique SA, Erfinder: Simon Henein, Ivar Kjelberg.
- ↑ Patent EP2290476B1: Isochronismuskorrektor für Uhrhemmungsmechanismus und mit einem solchen Korrektor ausgestatteter Hemmungsmechanismus. Angemeldet am 18. August 2009, veröffentlicht am 23. April 2014, Anmelder: Suisse Electronique Microtech, Erfinder: Simon Henein, Philippe Schwab.
- ↑ Patent CH690046A5: Freie Hemmung für Präzisionspendeluhren. Angemeldet am 18. November 1999, veröffentlicht am 31. März 2000, Anmelder: Uhren Atelier Haldimann, Erfinder: Beat Haldimann.
- ↑ Siegfried Hildebrand: Feinmechanische Bauelemente. Carl Hanser, 1968, S. 773–785.
Weblinks
- Volker Vyskocil: Hemmungen. UhrenTechnik, abgerufen am 30. August 2013.
- Hemmung. Watch-Wiki, abgerufen am 8. August 2013.
