Dieser Artikel ist im Entstehen und noch nicht Bestandteil der freien Enzyklopädie Wikipedia.
Solltest du über eine Suchmaschine darauf gestoVorlage:SSen sein, bedenke, dass der Text noch unvollständig sein und Fehler oder ungeprüfte Aussagen enthalten kann. Wenn du Fragen zum Thema hast, nimm Kontakt mit dem Autor Digamma auf.
Ein orthogonales Koordinatensystem ist ein Koordinatensystem, bei dem die Koordinatenlinien überall paarweise orthogonal zueinander sind. Neben den geradlinigen kartesischen Koordinatensystemen gehören dazu viele krummlinige Koordinatensysteme, unter anderem Polarkoordinaten in der euklidischen Ebene und Zylinder- und Kugelkoordinaten im euklidischen Raum.
Ortsvektor in verschiedenen Koordinatensystemen
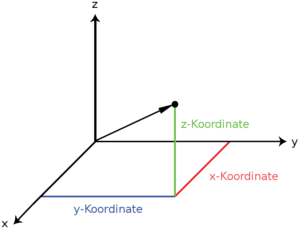
Kartesisches Koordinatensystem
Der durch einen Ortsvektor beschriebene Punkt kann durch die Koordinaten eines Koordinatensystems ausgedrückt werden, wobei der Bezugspunkt des Ortsvektors normalerweise in den Koordinatenursprung gelegt wird.
Kartesische Koordinaten
Üblicherweise wird der Ortsvektor in kartesischen Koordinaten in der Form

definiert. Daher sind die kartesischen Koordinaten gleichzeitig die Komponenten des Ortsvektors.
Zylinderkoordinaten
Der Ortsvektor als Funktion von Zylinderkoordinaten ergibt sich durch Umrechnen der Zylinderkoordinaten in die entsprechenden kartesischen Koordinaten zu

Hier bezeichnet  den Abstand des Punktes von der
den Abstand des Punktes von der  -Achse, der Winkel
-Achse, der Winkel  wird von der
wird von der  -Achse in Richtung der
-Achse in Richtung der  -Achse gezählt. und
-Achse gezählt. und  sind also die Polarkoordinaten des orthogonal auf die --Ebene projizierten Punktes.
sind also die Polarkoordinaten des orthogonal auf die --Ebene projizierten Punktes.
Mathematisch gesehen wird hier die Abbildung (Funktion) betrachtet, die den den Zylinderkoordinaten  die kartesischen Koordinaten
die kartesischen Koordinaten  des Ortsvektors zuordnet.
des Ortsvektors zuordnet.
Kugelkoordinaten
Der Ortsvektor als Funktion von Kugelkoordinaten ergibt sich durch Umrechnen der Kugelkoordinaten in die entsprechenden kartesischen Koordinaten zu

Hierbei bezeichnet  den Abstand des Punkts vom Ursprung (also die Länge des Ortsvektors), der Winkel wird in der --Ebene von der -Achse aus in Richtung der -Achse gemessen, der Winkel
den Abstand des Punkts vom Ursprung (also die Länge des Ortsvektors), der Winkel wird in der --Ebene von der -Achse aus in Richtung der -Achse gemessen, der Winkel  ist der Winkel zwischen der -Achse und dem Ortsvektor.
ist der Winkel zwischen der -Achse und dem Ortsvektor.
Basisvektoren
Die Basisvektoren in den verschiedenen Koordinatensystemen ergeben sich durch Normierung der partiellen Ableitungen des Ortsvektors nach den jeweiligen Koordinaten. Allgemein ergibt sich der zur Koordinate k gehörende Basisvektor zu

Kartesische Koordinaten

Die Basisvektoren  ,
,  und
und  sind zueinander orthonormal und bilden in dieser Reihenfolge ein Rechtssystem.
sind zueinander orthonormal und bilden in dieser Reihenfolge ein Rechtssystem.
Zylinderkoordinaten

Die Basisvektoren  ,
,  und sind zueinander orthonormal und bilden in dieser Reihenfolge ein Rechtssystem.
und sind zueinander orthonormal und bilden in dieser Reihenfolge ein Rechtssystem.
Kugelkoordinaten

Die Basisvektoren  ,
,  und sind zueinander orthonormal und bilden in dieser Reihenfolge ein Rechtssystem.
und sind zueinander orthonormal und bilden in dieser Reihenfolge ein Rechtssystem.
Wegelement
Ein Wegelement oder Linienelement  kann als totales Differential
kann als totales Differential  des Ortsvektors dargestellt werden. Allgemein ergibt sich für das vektorielle Wegelement bei Verwendung der Koordinaten
des Ortsvektors dargestellt werden. Allgemein ergibt sich für das vektorielle Wegelement bei Verwendung der Koordinaten  :
:

Mit der obenstehenden Gleichung für die Basisvektoren kann man auch

schreiben. Die Beträge der Ableitungen des Ortsvektors  nach den Koordinaten heißen metrische Koeffizienten
nach den Koordinaten heißen metrische Koeffizienten

Damit kann man das vektorielle Wegelement in der Form

darstellen. Für die bisher betrachteten Koordinatensysteme ergeben sich daraus die folgenden Darstellungsformen:



Relativistische Koordinaten
In der speziellen Relativitätstheorie (SRT) werden Raum und Zeit als eine zusammenhängende, vierdimensionale pseudoriemannsche Mannigfaltigkeit, die sogenannte Raumzeit, beschrieben. Ein Punkt auf dieser Mannigfaltigkeit, der durch drei Raumkoordinaten und eine Zeitkoordinate festgelegt wird, wird als Ereignis bezeichnet. Für jeweils zwei Ereignisse kann durch die Minkowski-Metrik ein Linienelement ds definiert werden, das zur Eigenzeit proportional ist:

Hierbei bezeichnet  die Minkowski-Metrik und
die Minkowski-Metrik und  das Vierervektordifferential.
das Vierervektordifferential.
Einzelnachweise
Literatur


